TOYOTA PARKING ASSIST-SENSOR SYSTEM OPERATION CHECK
-
Self-diagnosis System
-
If the clearance warning ECU assembly detects that an ultrasonic sensor is malfunctioning, a malfunction indication is displayed on the combination meter assembly and radio and display receiver assembly.
Malfunctioning Item Detection Condition Warning Message
(Multi-information Display)
Buzzer Sounding
(No. 1 Clearance Warning Buzzer)
Suspected Area Frozen indication
-
The ultrasonic sensor is covered with foreign matter, such as mud or snow
-
The ultrasonic sensor is frozen
Parking Assist Unavailable Clean Parking Assist Sensor ○
-
Check if any foreign matter is attached to the ultrasonic sensors and their surrounding areas
-
If there is no foreign matter attached to the ultrasonic sensors and their surrounding areas, check for DTCs
Open circuit indication
-
There is an open circuit between the clearance warning ECU assembly and the ultrasonic sensor
-
The ultrasonic sensor is malfunctioning
Parking Assist Malfunction Visit Your Dealer ○ Check for DTCs
-
Buzzer Sounding (No. 1 Clearance Warning Buzzer)
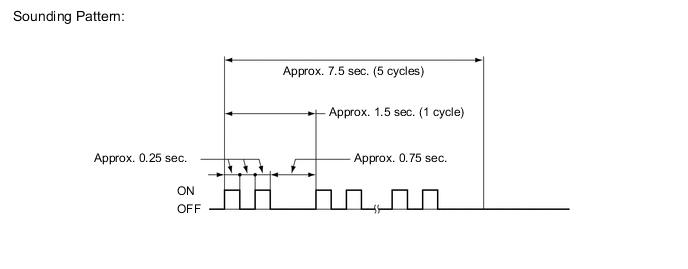
Tech Tips
Buzzer sounding is stopped after approximately 7.5 seconds elapsed.
-
-
-
DETECTION RANGE MEASUREMENT AND DISPLAY INSPECTION
Note
Perform the following measurement and inspection with the shift lever in a position other than P. Be sure to apply the parking brake and depress the brake pedal firmly to prevent the vehicle from moving.
-
Turn the engine switch on (IG).
-
Turn the intuitive parking assist system on.
-
Detection range measurement:
-
Move the shift lever according to the table below.
Measurement Area Shift Lever Position Front Corner In any position other than P Rear Corner R -
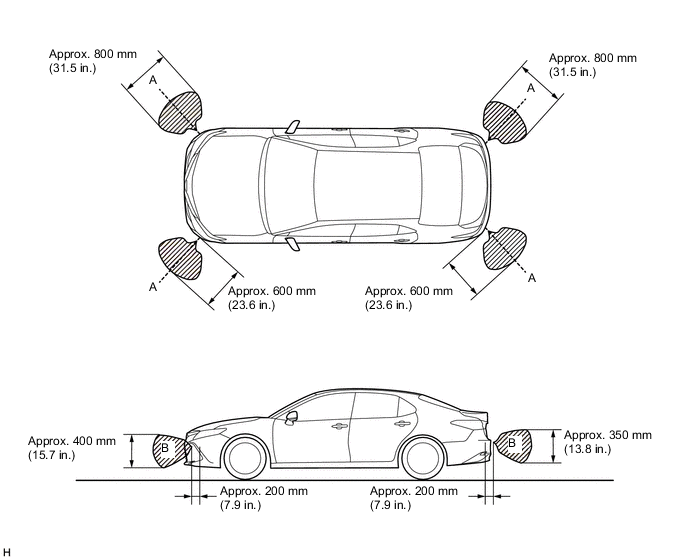
Move a 60 mm (2.4 in.) diameter pole near each sensor to measure its detection range.
Note
These detection ranges are applicable when positioning the 60 mm (2.4 in.) diameter pole parallel or perpendicular to the ground. The detection range varies depending on the measuring method and type of obstacle (such as walls).
Tech Tips
Have an assistant move the pole.
Figure 1. Corner Sonar Detection Range
-
-
Front corner sonar display and buzzer operation check
-
When the front corner ultrasonic sensor have detected an obstacle, check the displays and check that the buzzer sounds.
Operation Condition Engine Switch Intuitive Parking Assist System Shift Lever Position Vehicle Speed On (IG) On In any position other than P Less than approximately 10 km/h (6 mph) if speed is increasing 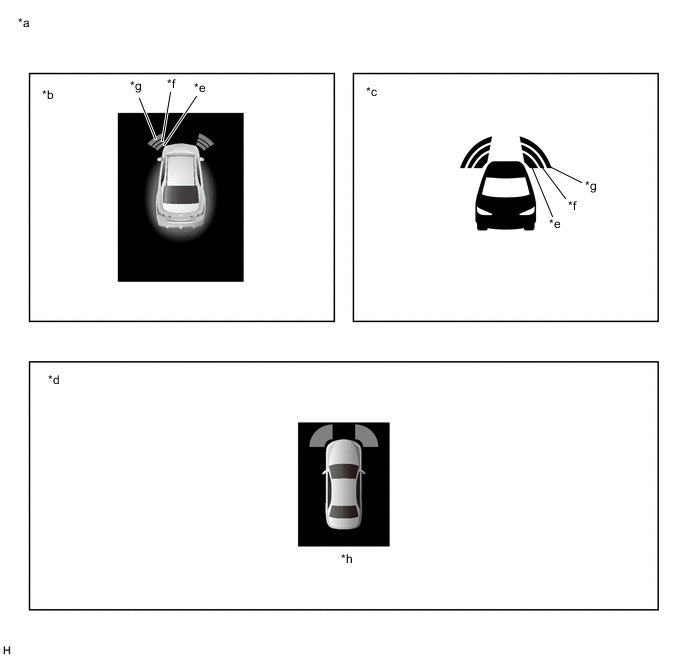
*a Example (Front Corner Sonar) *b Multi-information Display *c Headup Display (w/ Headup Display System) *d Multi-display *e Close-range Detection *f Medium-range Detection *g Long-range Detection *h w/ Parking Assist Monitor System 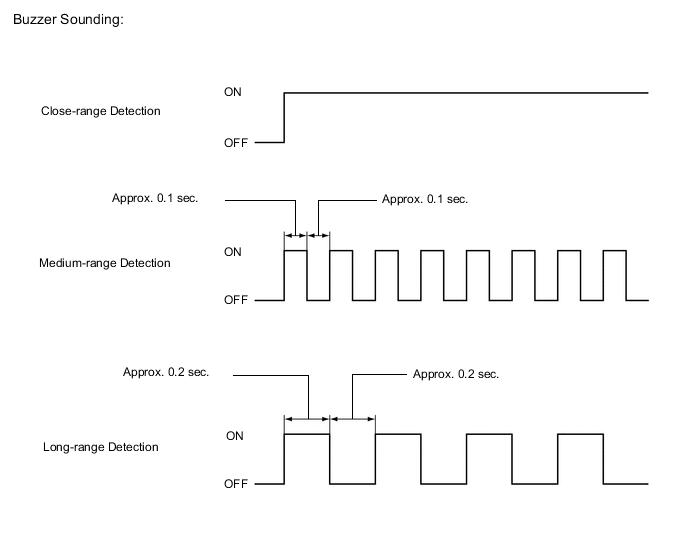
Tech Tips
Ultrasonic waves are used to measure the detection range; however, the detection range may vary depending on the ambient temperature.
-
-
Rear corner sonar display and buzzer operation check
-
When the rear corner ultrasonic sensor have detected an obstacle, check the display and check that the buzzer sounds.
Operation Condition Engine Switch Intuitive Parking Assist System Shift Lever Position Vehicle Speed On (IG) On R Less than approximately 10 km/h (6 mph) if speed is increasing 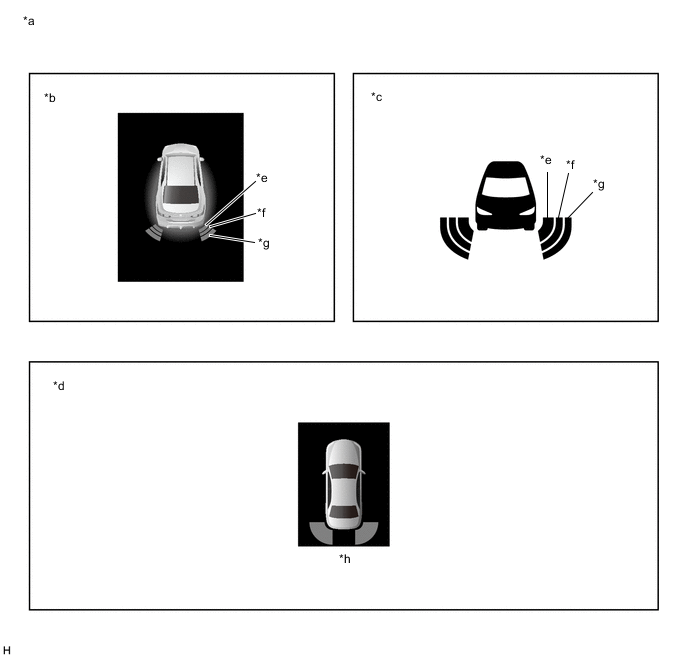
*a Example (Rear Corner Sonar) *b Multi-information Display *c Headup Display (w/ Headup Display System) *d Multi-display *e Close-range Detection *f Medium-range Detection *g Long-range Detection *h w/ Parking Assist Monitor System
Tech Tips
Ultrasonic waves are used to measure the detection range; however, the detection range may vary depending on the ambient temperature.
-
-