СИСТЕМА SFI ОПИСАНИЕ ДАТЧИК ПОЛОЖЕНИЯ КОЛЕНЧАТОГО ВАЛА И ДАТЧИК ПОЛОЖЕНИЯ РАСПРЕДВАЛА
КОНСТРУКЦИЯ
Используется датчик положения коленчатого вала с магнитным резистивным элементом (MRE). Зубчатый диск датчика положения коленчатого вала имеет 34 зубца, причем 2 зубца отсутствуют. Датчик положения коленчатого вала через каждые 10° регистрирует сигналы вращения коленчатого вала, а отсутствующие зубцы используются для определения верхней мертвой точки.
Датчики положения распредвалов и коленчатого вала представляют собой датчики с магнитным резистивным элементом (MRE).
Зубчатый диск датчика положения коленчатого вала монтируется на коленчатом валу. Зубчатый диск датчика положения коленчатого вала имеет 34 зубца, расположенных с интервалом 10°, причем 2 зубца отсутствуют. Благодаря такой конструкции датчик положения коленчатого вала формирует сигналы положения коленчатого вала (сигналы NE), в которых 33 импульса высокого и низкого уровней выдаются через каждые 10° поворота коленчатого вала, а 1 импульс – через каждые 30°. ECM использует сигнал NE для определения положения и частоты вращения коленчатого вала. Часть сигнала, соответствующая отсутствующим зубцам, используется для определения верхней мертвой точки.
Датчики положения распредвалов (впускных и выпускных клапанов) используют задающие роторы, установленные на распредвалы впускных и выпускных клапанов. Посредством этого задающего ротора датчик формирует сигналы положения распредвала (сигналы G2), в которых на каждые 2 оборота коленчатого вала приходится 3 импульса (3 высоких уровня и 3 низких уровня). Сравнивая сигналы G2 и NE, ECM определяет положение распредвала и идентифицирует цилиндр.
Figure 1. Датчик положения распредвала 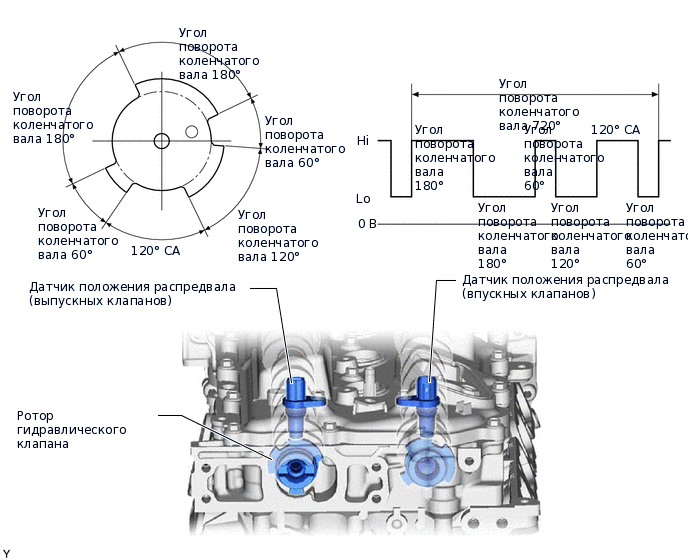
Figure 2. Датчик положения коленчатого вала 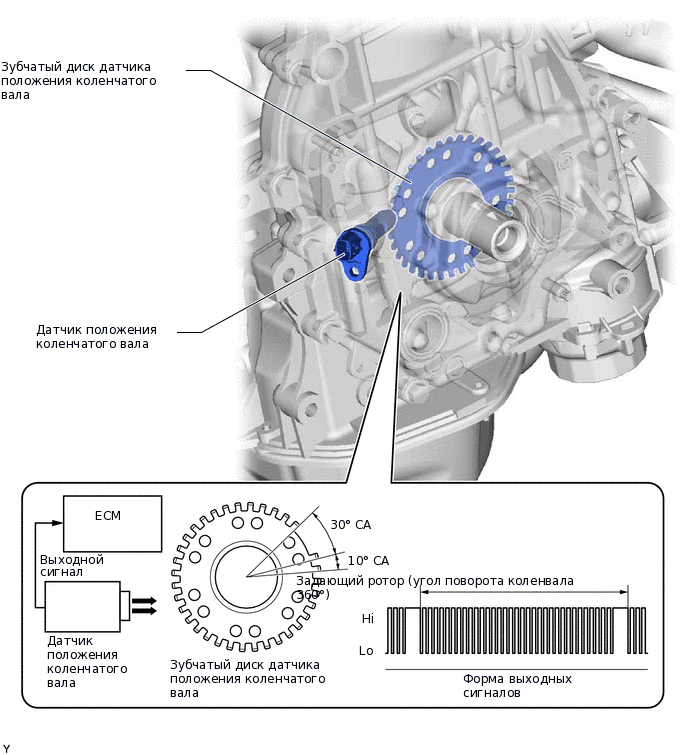
Figure 3. Формы выходных сигналов датчиков 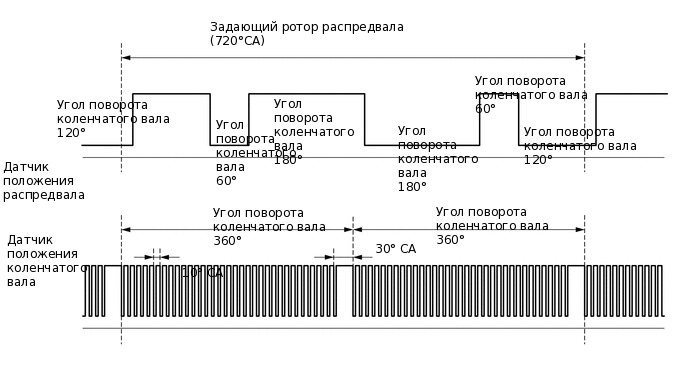
Датчик типа MRE состоит из магнитного резистивного элемента, магнита и чувствительного элемента.
Из-за особенностей профиля (выступающих и невыступающих частей) задающего ротора или зубчатого диска датчика положения коленчатого вала, вращающегося рядом с чувствительным элементом, изменяется направление вектора напряженности магнитного поля. В результате изменяется сопротивление магнитного резистивного элемента, и происходит переключение уровня выходного напряжения, подаваемого на ECM. На основе этого напряжения ECM определяет положения коленчатого вала и распредвалов.
Датчики типа MRE имеют следующие отличия от индуктивных датчиков, применяемых в обычных моделях:
Высокий и низкий уровни импульсных сигналов датчиков типа MRE не зависят от частоты вращения коленчатого вала двигателя. Таким образом, датчики типа MRE способны определять положения коленчатого вала и распредвалов уже на начальной стадии прокручивания коленчатого вала.
Индуктивные датчики выдают аналоговые сигналы, уровни которых изменяются в зависимости от частоты вращения коленчатого вала двигателя.