BRAKE CONTROL SYSTEM
-
SYSTEM CONTROL
-
The following are 2 examples that can be considered circumstances in which the tires exceed their lateral grip limit. VSC is designed to help control vehicle behavior by controlling the engine output and the brakes of each wheel when the vehicle is under one of the conditions indicated below:
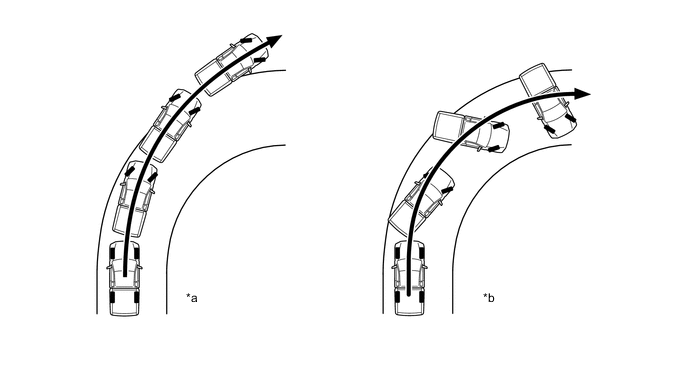
*a Front Wheel Skid Tendency (Understeer)
-
When the front wheels lose grip in relation to the rear wheels
*b Rear Wheel Skid Tendency (Oversteer)
-
When the rear wheels lose grip in relation to the front wheels
-
-
To determine the condition of the vehicle, sensors detect the steering angle, speed, yawrate and lateral acceleration of the vehicle, which are then calculated by the skid control ECU.
-
Whether or not the vehicle is experiencing a front wheel skid is determined by the difference between the target yaw rate and the vehicle's actual yaw rate. When the vehicle's actual yaw rate is smaller than the target yaw rate (a target yaw rate is determined based on the vehicle speed and steering angle) that should be generated when the driver operates the steering wheel, it means the vehicle is making a turn at a greater angle than the target locus of travel. Thus, the skid control ECU determines that there is a large front wheel skid tendency.
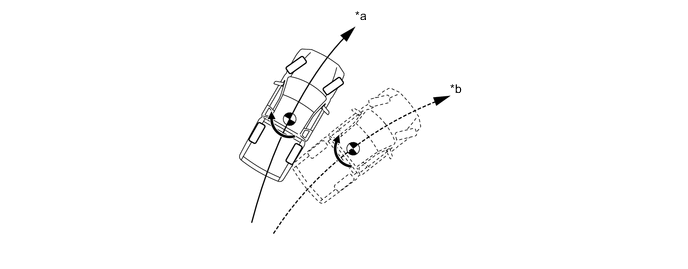
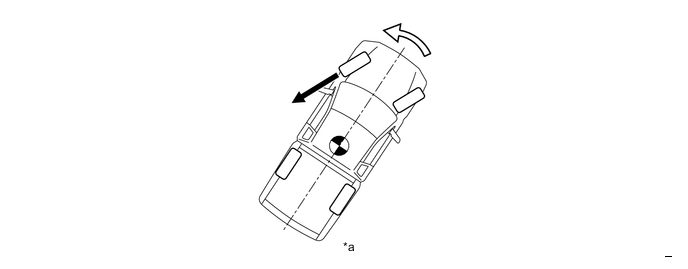
*a Actual Locus of Travel (Actual Yaw Rate) *b Locus of Travel Based on Target Yaw Rate -
Whether or not the vehicle is experiencing a rear wheel skid is determined by the values of the vehicle's slip angle and slip angular velocity (time-dependent changes in the vehicle's slip angle). When the vehicle's slip angle is large, and the slip angular velocity is also large, the skid control ECU determines that the vehicle has a large rear wheel skid tendency.
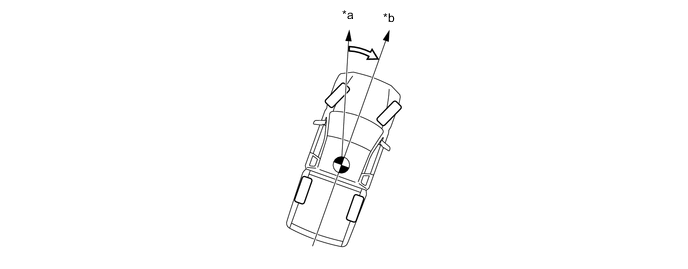
*a Travel Direction of Vehicle's Center of Gravity *b Movement of Vehicle 
Slip Angle - - -
When the skid control ECU determines that the vehicle exhibits a tendency to experience a front wheel skid or a rear wheel skid, it decreases the engine output and applies the brakes of the front or rear wheels to control the vehicle's yaw moment. The basic operation of the VSC is described below. However, the control method differs depending on the vehicle's characteristics and driving conditions.
-
When the skid control ECU determines that there is a large front wheel skid tendency, it takes countermeasures in accordance with the extent of that tendency. The skid control ECU controls the engine output and applies the brakes of both rear wheels and the front wheel on the outside of the turn in order to help restrain the front wheel skid tendency.
Figure 1. Front Wheel Skid Tendency
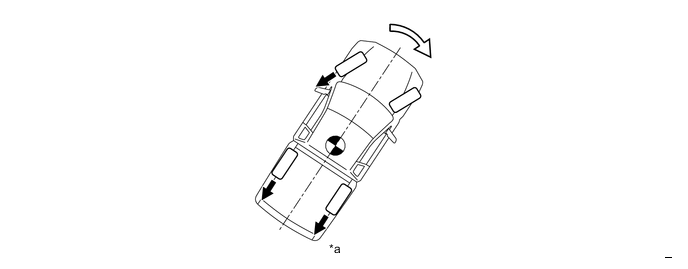
*a Making a Right Turn - - 
Brake Force Control Moment -
When the skid control ECU determines that there is a large rear wheel skid tendency, it takes countermeasures in accordance with the extent of that tendency. The skid control ECU applies the brake of the front wheel of the outer circle of the turn, and generates an outward moment of inertia in the vehicle in order to restrain the rear wheel skid tendency. Along with the reduction in the vehicle speed caused by the braking force, excellent vehicle stability is ensured. In some cases, the skid control ECU applies the brakes of the rear wheels, as necessary.
Figure 2. Rear Wheel Skid Tendency
*a Making a Right Turn - - Brake Force Control Moment
-