PRE-COLLISION SYSTEM SYSTEM DESCRIPTION
PRE-COLLISION SYSTEM DESCRIPTION
The pre-collision system determines the possibility of a collision according to information such as the position of the obstacle and its relative speed, and provides optimal control to avoid a collision and control to reduce the impact during a collision via warnings, brake assist and automatic braking.
FUNCTION OF COMPONENTS
Component
Function
Pre-collision City Sensor
Acquires information about a preceding vehicle from a monocular camera and laser sensor to perform pre-collision system control.
Sends the information display, PCS OFF warning light and pre-collision buzzer signal to the combination meter assembly based on pre-collision control information.
Pre-collision System Cancel Switch Assembly
Turn the pre-collision system on/off and changes the warning timing.
Combination Meter Assembly
Illuminates to warn the driver in accordance with signals from the pre-collision city sensor.
Blinking when the system is malfunctioning.
Blinking or illuminates when the system is temporarily disabled.
Blinking or illuminates when the pre-collision system is not available due to certain reasons or when pre-collision brake and pre-collision brake assist operation are disabled since the VSC system has been disabled.
Sounds to warn the driver in accordance with signals from the pre-collision city sensor when the system are operating or malfunctioning.
ECM
Detects the shift position signal and accelerator pedal opening angle and sends that information to the pre-collision city sensor.
Performs engine output control based on information from the pre-collision city sensor.
Brake Actuator Assembly (Skid Control ECU)
Sends information such as the vehicle speed signal, stop light switch signal and brake control hydraulic pressure to the pre-collision city sensor.
Performs brake hydraulic pressure and emergency brake signal control based on information from the pre-collision city sensor.
Spiral Cable Sub-assembly (Steering Angle Sensor)
Detects the steering angle and steering direction.
Airbag Sensor Assembly (Yaw Rate and Acceleration Sensor)
Detects the yaw rate and acceleration of the vehicle and transmits signals to the pre-collision city sensor.
VSC OFF Switch
Disables the pre-collision brake and pre-collision brake assist operation when the switch is turned on.
OUTLINE OF PRE-COLLISION DETECTION
Collision detection
The system determines in advance the possibility of a collision and whether the collision can be avoided based on road surface conditions and the position and speed of the preceding vehicle according to information about the preceding vehicle from the pre-collision city sensor.
Tip:For details about the system, see "Outline of Pre-collision System Control" and the function descriptions.
Component
Component
Detection Content
Pre-collision city sensor
Obstacle in front (vehicle)
OUTLINE OF PRE-COLLISION SYSTEM CONTROL
Control Condition
Start of Control
Sender ECU
Receiver ECU
Operated Parts
Pre-collision warning
Collision is possible
Pre-collision city sensor
Combination meter assembly
Combination meter assembly (warning display)
Combination meter assembly (pre-collision buzzer (warning sound))
Pre-collision brake assist
Collision is highly possible
Pre-collision city sensor
Combination meter assembly
Brake actuator assembly (skid control ECU)
Combination meter assembly (warning display)
Combination meter assembly (pre-collision buzzer (warning sound))
Brake actuator assembly (skid control ECU)
Pre-collision brake
Collision is unavoidable
Pre-collision city sensor
Combination meter assembly
Brake actuator assembly (skid control ECU)
ECM
Combination meter assembly (warning display)
Combination meter assembly (pre-collision buzzer (warning sound))
Brake actuator assembly (skid control ECU)
PRE-COLLISION ALARM CONTROL
When the system determines that there is a risk of a collision with an obstacle in front of the vehicle, a message on the multi-information display and the pre-collision buzzer are used to warn the driver to avoid the collision.
PRE-COLLISION BRAKE ASSIST CONTROL
When the system determines that there is a risk of a collision with an obstacle in front of the vehicle, brake assist enters standby mode and the hydraulic brake pressure is increased to improve braking effectiveness when the driver depresses the brake pedal.
PRE-COLLISION BRAKE CONTROL
When the system determines that a collision with an obstacle in front of the vehicle is unavoidable, the brakes are operated to reduce the collision speed and reduce the impact during the collision.
Note:When the system detects that the driver is attempting to cancel operation of the system by performing operations such as the following, pre-collision brake control will be canceled.
Accelerator pedal is forcibly depressed
Steering wheel is operated quickly to avoid a collision
Turning the VSC OFF switch on disables pre-collision brake assist control and pre-collision brake control.
Tip:After pressing the switch, the PCS OFF warning light in the combination meter assembly will illuminate.
PRE-COLLISION SYSTEM OPERATION CONDITIONS
The pre-collision alarm control, pre-collision brake assist control and pre-collision brake control can operate if all of the following conditions are met:
Pre-collision system is ON
VSC system is not disabled
Speed Limiter System (ASL) is not operating
If the following conditions are met, the pre-collision alarm control will operate:
Vehicle speed is between approximately 15 km/h (10 mph) and 140 km/h (87 mph)
Relative speed is approximately 15 km/h (10 mph) or more
If the following conditions are met, the pre-collision brake assist control will operate:
Vehicle speed is between approximately 30 km/h (19 mph) and 80 km/h (50 mph)
Relative speed is approximately 30 km/h (19 mph) or more
If the following conditions are met, the pre-collision brake control will operate:
Vehicle speed is between approximately 10 km/h (6 mph) and 80 km/h (50 mph)
Relative speed is approximately 10 km/h (6 mph) or more
OUTLINE OF PRE-COLLISION CITY HEATER
The pre-collision city heater can operate if all of the following conditions are met:
No pre-collision system DTCs are stored
Engine is running
If either of the following conditions are met, the pre-collision city heater will operate:
Ambient temperature (detected by air conditioning system) is 5°C (41°F) or lower
Vehicle is being driven when ambient temperature is 5 to 20°C (41 to 68°F) and area of windshield in front of pre-collision city sensor begins to fog (blockage of pre-collision city sensor detected)
If the following condition is met, the pre-collision city heater will stop operating:
30 minutes have elapsed since pre-collision city heater operation began
PRECAUTION FOR PRE-COLLISION CITY SENSOR
When the following vehicle conditions are detected, the pre-collision city sensor may determine that the possibility of a collision is high or a collision is unavoidable and activate the pre-collision system, but this is not a malfunction.
PRE-COLLISION SYSTEM AUTOMATIC CANCELLATION
When a system malfunction is detected and the pre-collision city sensor cannot detect vehicles, pre-collision system operation will be canceled automatically.
Tip:If the pre-collision system is malfunctioning or temporarily disabled, the PCS OFF warning light will blink or illuminate.
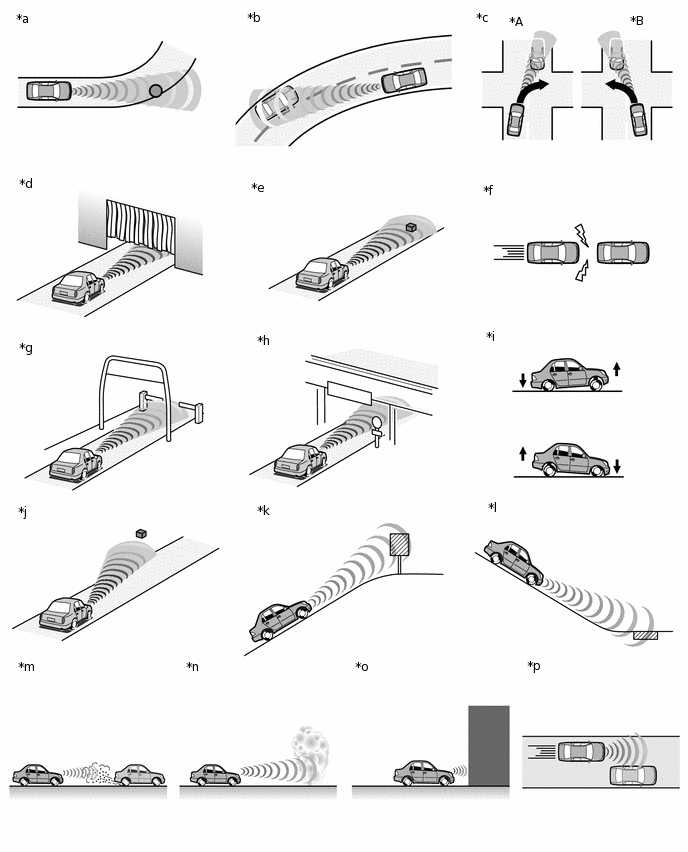
*A |
for RHD |
*B |
for LHD |
*a |
There are objects on the side of the road at the beginning of a curve (a guardrail, street light, billboard, etc.). |
*b |
Passing an oncoming vehicle on a curve. |
*c |
When passing an oncoming vehicle while making a left turn (for LHD) or right turn (for RHD). |
*d |
Passing through an area which contains an obstacle that covers the vehicle (such as a hanging curtain). |
*e |
There are metal objects, bumps or protrusions on the road (a metal plate covering road construction, a mesh drain cover, a manhole, etc.). |
*f |
Suddenly approaching a preceding vehicle. |
*g |
Approaching an electrical toll collection gate (reacts to bar). |
*h |
Crossing an overpass, traffic sign, signboard. |
*i |
The vehicle height drastically changes (nose-up, nose-down). |
*j |
Axis misalignment of pre-collision city sensor (reinstallation, applied impact, etc.). |
*k |
There is a billboard or sign at the top of an incline. |
*l |
There are metal objects at the bottom of a decline (a metal plate covering road construction, a mesh drain cover, a manhole, etc.). |
*m |
Snow, water, etc., is kicked up by a preceding vehicle. |
*n |
Passing through an area which contains heavy fog or smoke. |
*o |
Parking with the front of the vehicle extremely close to an obstacle (wall, vehicle, etc.). |
*p |
Passing extremely close to the side of an obstacle (stopped vehicle, guardrail, etc.). |
The detection performance of the monocular camera sensor may deteriorate under the following conditions.
-
The headlights are not on when the surrounding area is dark, such as inside a tunnel or at night.
A strong light from directly ahead of the vehicle strikes the lens (light from the headlights of an oncoming vehicle, the sun, etc.).
The temperature of the sensor is extremely high, such as after the vehicle is parked in hot weather.
The following environments and conditions may cause the detection performance to deteriorate.
-
On a steep curve or undulating road.
Something or someone suddenly emerges in front of the vehicle at a place such as an intersection.
Another vehicle suddenly cuts in front of the vehicle.
In severe weather such as heavy rain, fog, snow or a sand storm.
The vehicle is skidding sideways.
The vehicle height changes significantly (front of vehicle inclined either upward or downward).
The front windshield is dirty.
An obstacle is between the vehicle and a light source.
The preceding vehicle is one which does not easily reflect lasers (the vehicle is low, small, dirty, etc.).
When the sensor is misaligned due to a strong impact being applied to the sensor, etc.