СИСТЕМА SFI ОПИСАНИЕ ПРИВОД VALVEMATIC
КОНСТРУКЦИЯ
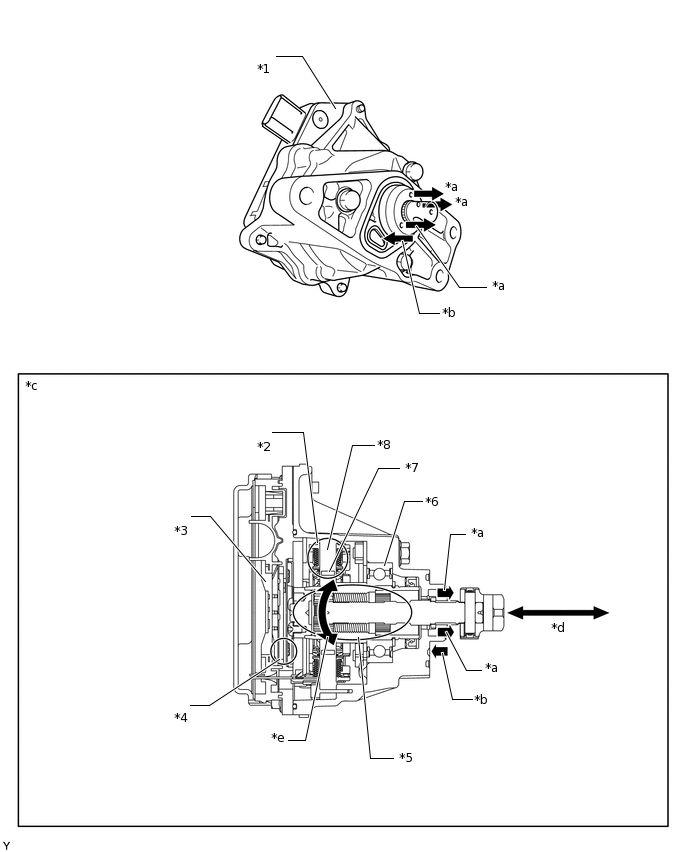
К основным узлам контроллера бесступенчатого подъема клапанов относятся EDU, бесщеточный электродвигатель и дифференциальный роликовый преобразователь.
Внутренние шестерни контроллера бесступенчатого подъема клапанов смазываются моторным маслом.
Компактность плоского бесщеточного электродвигателя обеспечивает неодимовый магнит. Плоский бесщеточный электродвигатель представляет собой электродвигатель постоянного тока, в котором отсутствуют щетки и коллектор. Многополюсный магнит выполняет функции ротора, который переключает полярность напряжения на окружающей обмотке возбуждения статора синхронно с вращением ротора. Получающееся в результате переменное поле и магнитный поток магнита ротора вызывают притяжение и отталкивание, создающие крутящий момент.
Tip:Неодимовый магнит: Неодимовый магнит представляет собой магнит из редкоземельных металлов, который состоит в основном из неодима, железа и бора. Неодимовый магнит характеризуется высокой плотностью магнитного потока и способен создать чрезвычайно сильное магнитное поле.
Блок EDU приводит в действие электродвигатель в соответствии с сигналами от ECM. Дифференциальный роликовый преобразователь преобразует вращение вала электродвигателя в линейное перемещение. Это линейное перемещение используется в механизме VALVEMATIC.
*1
Контроллер бесступенчатого подъема клапанов в сборе
*2
Электродвигатель
*3
EDU
*4
Чувствительный элемент
Датчик положения электродвигателя
Датчик рабочего угла
*5
Дифференциальный роликовый преобразователь
*6
Подшипник
*7
Ротор/электродвигатель
*8
Статор
*a
Выпуск моторного масла
*b
Впуск моторного масла
*c
Сечение контроллера бесступенчатого подъема клапанов в сборе
*d
Линейное перемещение
*e
Вращательное движение
-
-
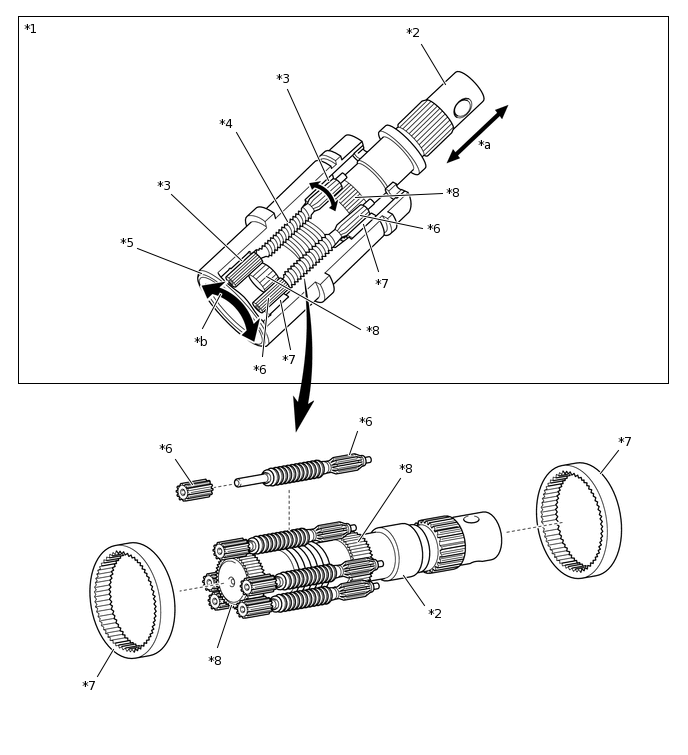
Электродвигатель вращает гайку на дифференциальном роликовом преобразователе. Движение гайки передается на шестерню и винт планетарного редуктора, в результате чего вал солнечной шестерни перемещается линейно.
*1
Дифференциальный роликовый преобразователь
*2
Вал солнечной шестерни
*3
Планетарный редуктор (шестерня)
*4
Планетарный редуктор (винт)
*5
Гайка
*6
Шестерня
*7
Коронная шестерня
*8
Солнечная шестерня
*a
Линейное перемещение
*b
Вращательное движение
ПРИНЦИП РАБОТЫ
В базовом режиме ECM определяет требуемую массу воздуха на впуске в соответствии с углом поворота педали акселератора, частотой вращения коленчатого вала двигателя и сигналами различных датчиков. EDU, встроенный в контроллер бесступенчатого подъема клапанов, определяет требуемые высоту подъема и рабочий угол впускных клапанов в соответствии с сигналами от ECM.
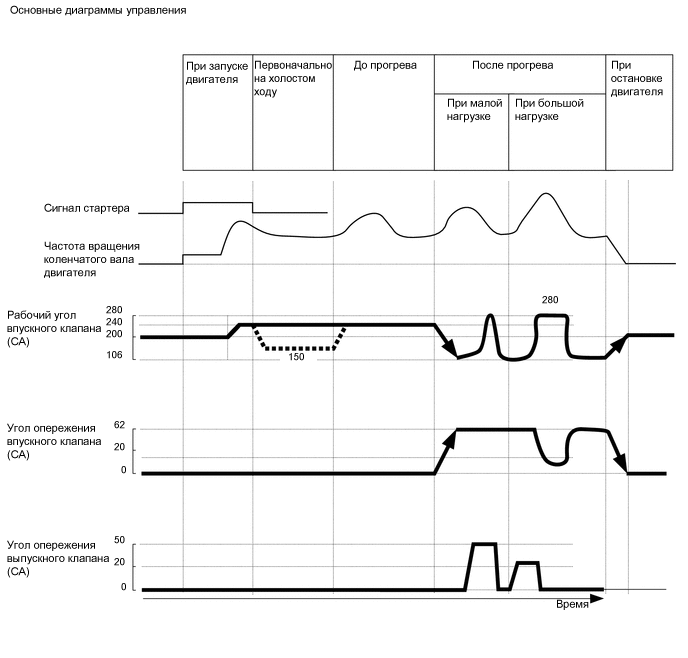
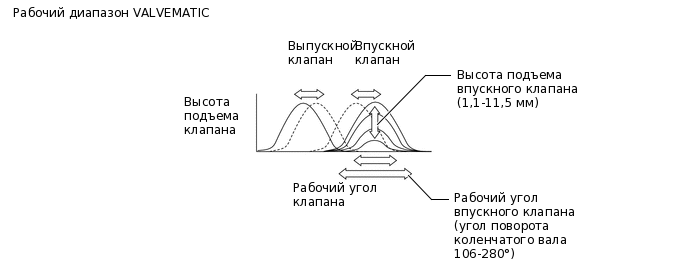
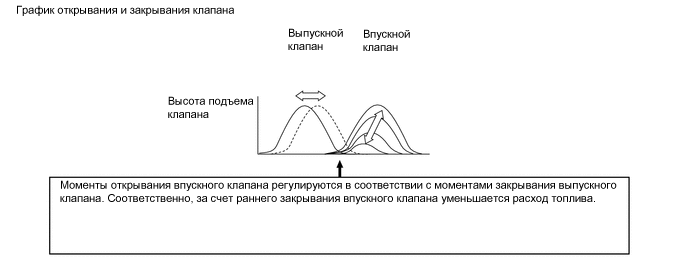
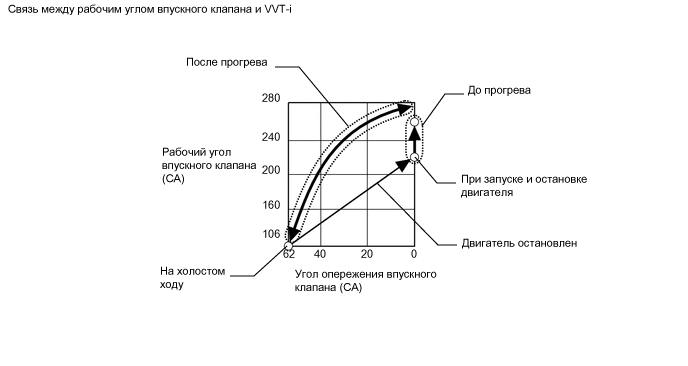
Чтобы оптимизировать моменты открывания и закрывания клапанов, VALVEMATIC координирует управление с двойной системой VVT-i. Таким образом, VALVEMATIC регулирует высоту подъема и рабочий угол клапанов в соответствии с условиями движения. Так как VALVEMATIC имеет характеристики опережения, в соответствии с которыми высота подъема и рабочий угол клапанов изменяются, то эта система осуществляет управление, обеспечивающее поддержание требуемой высоты подъема клапанов. Характеристики опережения данной системы VVT-i отличаются от обычной двойной системы управления VVT-i.
В следующей таблице рассмотрено согласованное управление VALVEMATIC с ETCS-i в базовом режиме.
Управление
Принцип работы
Управление запуском
VALVEMATIC регулирует рабочий угол впускных клапанов, а ETCS-i приводит в действие дроссельную заслонку, регулируя массу воздуха на впуске.
Начальная регулировка частоты вращения на холостом ходу
Управление до прогрева
Управление после прогрева
VALVEMATIC регулирует высоту подъема и фазы газораспределения впускных клапанов, а ETCS-i открывает дроссельную заслонку шире, чем в обычном режиме, и уменьшает разрежение во впускном коллекторе, чтобы минимизировать насосные потери.
На холостом ходу, когда масса воздуха на впуске мала, ETCS-i регулирует ее, как и ранее.
Управление остановкой двигателя