СИСТЕМА ГИБРИДНОЙ ТРАНСМИССИИ ОПИСАНИЕ MG1 И MG2
КОНСТРУКЦИЯ
MG1 и MG2
MG1 и MG2 представляют собой компактные облегченные электродвигатели переменного тока с постоянными магнитами и высоким КПД.
Каждый из мотор-генераторов MG1 и MG2 включает в себя статор, обмотку статора, ротор, постоянные магниты и датчик частоты вращения.
MG1 заряжает высоковольтную аккумуляторную батарею и выдает электрическую энергию для приведения в движение MG2 и MGR*. Кроме того, регулируя количество генерируемой электроэнергии (соответственно, изменяя частоту вращения генератора), MG1 эффективно управляет бесступенчатой трансмиссией. Кроме того, во время пуска двигателя MG1 действует как стартер.
*: для моделей с постоянным полным приводом
MG2 приводит в движение передние колеса, используя электрическую энергию от MG1 или высоковольтной аккумуляторной батареи. Кроме того, во время замедления он действует как генератор, заряжая высоковольтную аккумуляторную батарею.
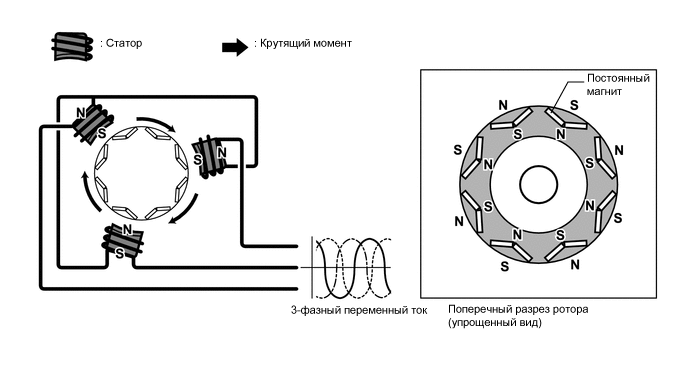
При протекании трехфазного переменного тока через трехфазные обмотки статора в электродвигателе создается вращающееся магнитное поле. Вследствие регулирования этого вращающегося магнитного поля в соответствии с угловым положением и частотой вращения ротора постоянные магниты, установленные на ротор, притягиваются вращающимся магнитным полем и, таким образом, создают крутящий момент.
Создаваемый крутящий момент практически пропорционален амплитуде тока, а частота вращения определяется частотой переменного тока.
Кроме того, за счет надлежащего регулирования взаимосвязи вращающегося магнитного поля и углов магнитов ротора высокий крутящий момент может эффективно создаваться вплоть до самых высоких частот вращения.
Когда электродвигатель генерирует электроэнергию, вращение ротора приводит к созданию магнитного поля, которое вызывает появление тока в обмотках фаз статора.
Датчик параметров вращения (резольверного типа)
Датчик параметров вращения резольверного типа представляет собой чрезвычайно надежный и компактный датчик, который точно определяет положение магнитного полюса. Знание точных положений магнитных полюсов ротора электродвигателя необходимо для обеспечения эффективного управления мотор-генераторами MG1, MG2 и MGR*. У каждого из мотор-генераторов MG1 и MG2 имеется собственный датчик параметров вращения.
*: для моделей с постоянным полным приводом
Статор датчика параметров вращения содержит катушки 3 типов: катушку возбуждения A, катушку обнаружения S и катушку обнаружения C.
Ротор датчика параметров вращения имеет овальную форму, поэтому при его вращении зазор между статором и ротором изменяется.
Протекание переменного тока через катушку возбуждения A вызывает формирование магнитного поля постоянной частоты. Под действием этого магнитного поля катушки S и C выдают сигналы, которые соответствуют положению ротора. Соответственно, ЭБУ мотор-генератора (ЭБУ MG) определяет абсолютное положение по разности выходных сигналов катушек S и C. Кроме того, исходя из изменения положения за заданный интервал времени ЭБУ MG вычисляет частоту вращения.
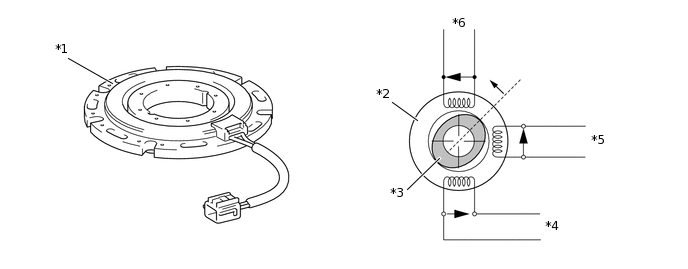
*1
Датчик частоты вращения (резольвер)
*2
Статор
*3
Ротор
*4
Выходная катушка С
*5
Выходная катушка S
*6
Катушка возбуждения A
Так как в катушку возбуждения датчика параметров вращения подается переменный ток постоянной частоты, магнитное поле постоянной частоты действует на катушки S и C независимо от частоты вращения ротора. Магнитное поле катушки возбуждения переносится ротором к катушкам S и C. Ротор имеет овальную форму, поэтому при его вращении зазор между статором и ротором датчика параметров вращения изменяется. Из-за изменения зазора максимальные значения выходных сигналов катушек S и C изменяются в соответствии с положением ротора.
ЭБУ MG постоянно контролирует эти максимальные значения и, соединяя их, формирует эквивалентный сигнал. ЭБУ MG вычисляет абсолютное положение ротора, исходя из разности значений сигналов катушек S и C. Кроме того, по разности фаз эквивалентных сигналов катушек S и C ЭБУ MG определяет направление вращения ротора. Наконец, на основании изменения положения ротора за заданный интервал времени, ЭБУ MG рассчитывает частоту вращения.
На приведенных ниже диаграммах показаны выходные сигналы катушек A, S и C при совершении ротором поворота на 180°.
Figure 1. Выходной сигнал датчика частоты вращения (рисунок поясняет принцип работы) 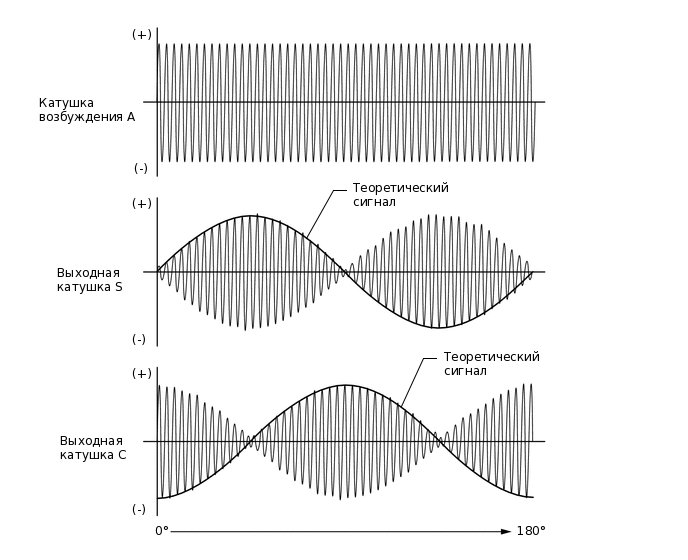
Датчик температуры
Датчики температуры используются для определения температур статоров.
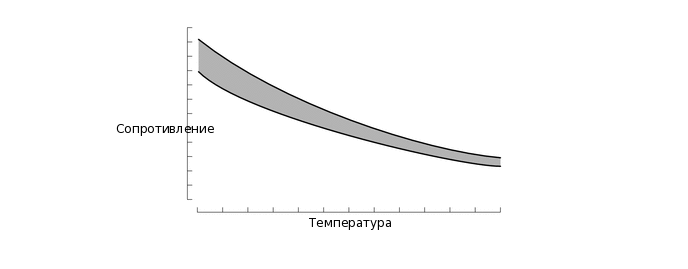
Сопротивление термистора датчика температуры изменяется в соответствии с изменением температуры электродвигателя. При низкой температуре электродвигателя сопротивление термистора велико. И наоборот, при высокой температуре электродвигателя сопротивление термистора мало.
Когда температура электродвигателя возрастает, его мощность ограничивается.
Figure 2. Характеристики датчика температуры