ADAPTIVE VARIABLE SUSPENSION SYSTEM
-
OUTLINE
-
An Adaptive Variable Suspension system (AVS) is used.
-
The AVS controls the damping force of the shock absorber assemblies for all 4 wheels in accordance with the driving conditions and road surface conditions. In this way, it achieves a comfortable ride and flat ride (high levels of stability).
-
The AVS is a semi-active type of suspension. Its absorber control ECU estimates the vehicle conditions based on the signals from the sensors and the switches.
-
The absorber control ECU controls the absorber control actuators built into the lower portion of the shock absorber assemblies to control the damping force. This achieves pinpoint control due to superior response performance.
-
By operating the drive mode select, the driver can select 2 types of damping forces for the shock absorber assemblies.
-
Non-linear H∞ control is used for the basic control of the damping force.
Tech Tips
-
H∞ control is a theory for designing a controller that meets the control specifications that are represented by the H ∞ norm (a measurement unit of the transfer function in the system). When this is expanded into a non-linear system, it is called "non-linear H ∞ control".
-
The "H" is the initial letter of the mathematician named Hardy (who studied the stability of control systems) who advocated the mathematical space that is handled by this control logic. The " ∞ " represents the ∞ norm, which is one of the mathematical units used for measuring the size of the signals.
-
-
-
MAIN FEATURES
-
Riding Comfort
-
As vibrations in the roll direction can cause discomfort in humans, repercussion control (non-linear H∞ control) has been provided as a result of a focus on body control in the roll direction.
-
Under repercussion control, the 4 wheels work simultaneously to suppress vibrations in the heave, roll and pitch directions. As a result, vibration suppression in the roll and pitch directions is ensured while conventional vibration suppression in the heave direction is maintained.
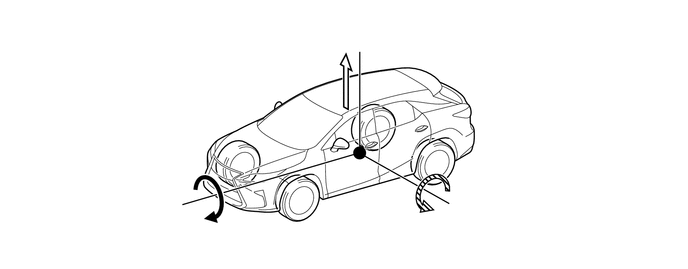

Roll 
Heave 
Pitch - -
-
-
Vehicle Posture Change
-
Vehicle condition detection methods have been focused on to achieve comfortable steering operation, thus achieving good roll posture control.
-
Compared to the conventional roll posture control based on the steering sensor signal, a deceleration sensor signal is actively utilized to more finely detect vehicle conditions when turning, thus optimizing and smoothening the damping force switching. As a result, natural and smooth vehicle posture change has been achieved.
-
-