LANE DEPARTURE ALERT SYSTEM DETAILS PRE-COLLISION CITY SENSOR
FUNCTION
The pre-collision city sensor captures the road image up to approximately 50 m (164 ft.) ahead of the pre-collision city sensor.
When one of the following operations is conducted, the pre-collision city sensor angle must be adjusted. For details, refer to the Repair Manual.
The pre-collision city sensor is removed and reinstalled or replaced.
Parts relating to the tires or suspension are replaced or adjusted.
Excessive force is applied to the pre-collision city sensor.
The pre-collision city sensor detects lane markers and calculates the radius to the center of the lane, the vehicle center position disparity among the distances from each left and right lane marker and the angle disparity between the vehicle traveling direction and each left and right lane marker.
The lane departure alert system does not operate if the vehicle approaches the lane marker at a shallow angle, but does not cross it.
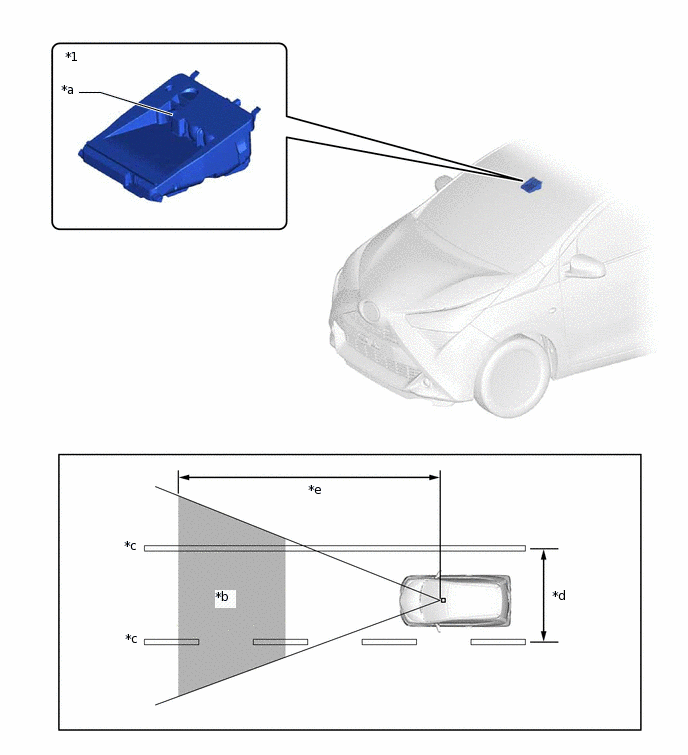
*1
Pre-collision City Sensor
-
-
*a
Monocular camera sensor
*b
Image processing Range
*c
Lane Marker
*d
Approximately 3.0m (9.8 ft.) or more
*e
Approximately 50 m (164 ft.)
-
-
Figure 1. Pre-collision City Sensor Calculation 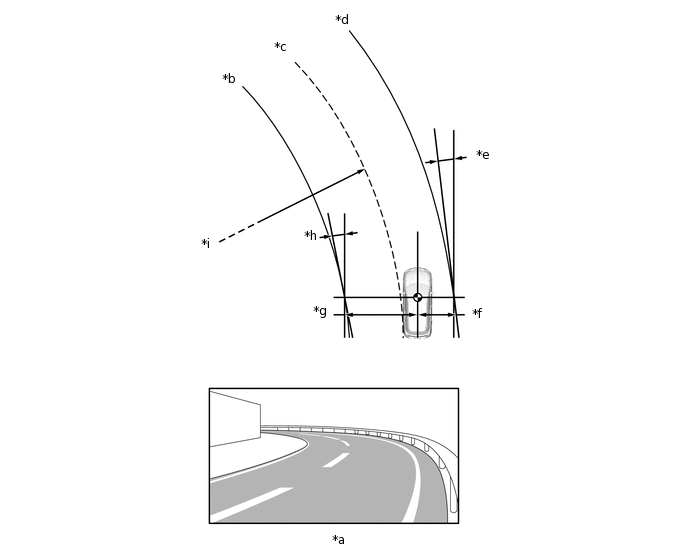
*a
Image Captured by Pre-collision City Sensor
*b
Left Lane Marker
*c
Center of Lane
*d
Right Lane Marker
*e
Angle between the vehicle traveling direction and right lane marker
*f
Distance from the vehicle to right lane marker
*g
Distance from the vehicle to left lane marker
*h
Angle between the vehicle traveling direction and left lane marker
*i
Angle between the vehicle traveling direction and left lane marker.
Lane radius (If only the left lane marker or right lane marker is recognized, the radius of the recognized lane marker will be calculated)
-
-