СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ОБ УХОДЕ С ПОЛОСЫ (с участием рулевого управления) ПОДРОБНОЕ ОПИСАНИЕ ПЕРЕДНЕЙ КАМЕРЫ РАСПОЗНАВАНИЯ ОБЪЕКТОВ
КОНСТРУКЦИЯ
Передняя камера распознавания объектов получает изображение дороги на расстоянии до 50 м (164 фута) перед передней камерой распознавания объектов.
Передняя камера распознавания объектов определяет разделительные линии и рассчитывает радиус изгиба осевой линии полосы, угол отклонения от курса, боковое отклонение от центра полосы, а также ширину полосы.
Угол установки передней камеры распознавания объектов необходимо отрегулировать после выполнения любой из указанных ниже операций. Более подробную информацию см. в Руководстве по ремонту.
Передняя камера распознавания объектов снята и установлена, либо заменена.
Регулировка или замена деталей, связанных с шинами или подвеской.
К передней камере распознавания объектов приложено большое усилие.
Функция предупреждения об уходе с полосы не включается, если автомобиль просто приближается к линии разметки (но не пересекает ее), пока автомобиль движется параллельно линии разметки.
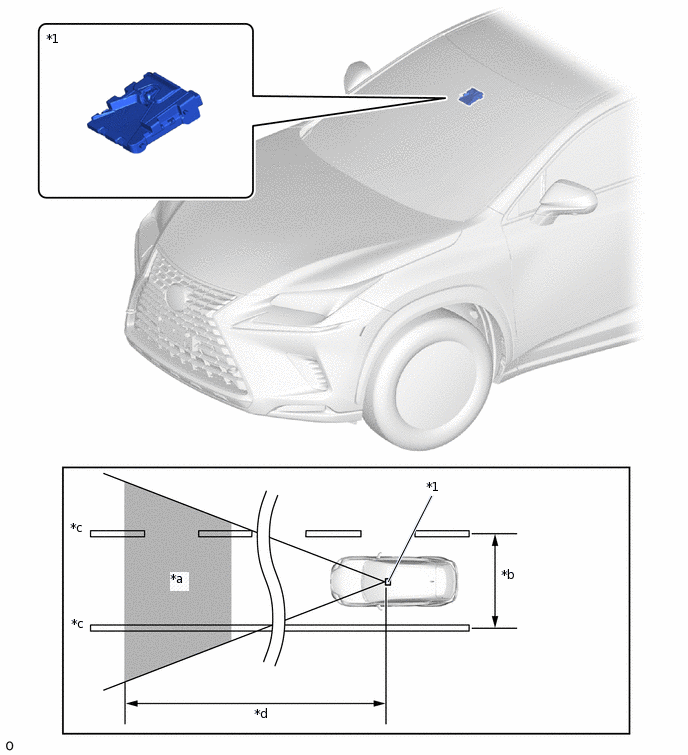
*1
Передняя камера распознавания объектов
-
-
*a
Зона обработки изображения
*b
Приблизительно 3,0 м (9,8 фута) или более
*c
Разделительная линия
*d
Приблизительно 50 м (164 фута)
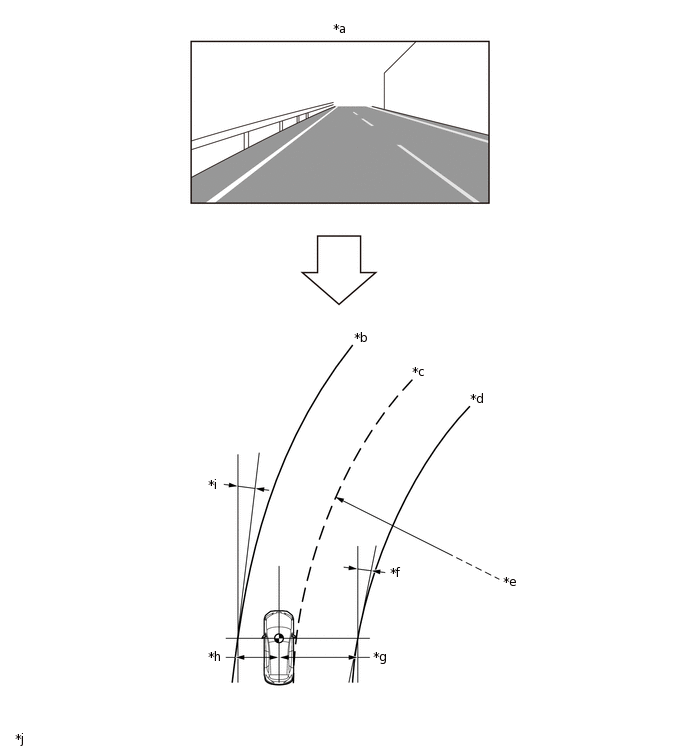
*a
Изображение, получаемое передней камерой распознавания объектов
*b
Левая разделительная линия
*c
Центр полосы движения
*d
Правая разделительная линия
*e
Радиус полосы (если обнаружена только левая или только правая разделительная линия, вычисляется радиус обнаруженной разделительной линии).
*f
Угол между направлением движения автомобиля и правой разделительной линией
*g
Расстояние от центра автомобиля до правой разделительной линии
*h
Расстояние от центра автомобиля до левой разделительной линии
*i
Угол между направлением движения автомобиля и левой разделительной линией
*j
Этот рисунок приведен только для примера.