СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ УПРАВЛЕНИЕ СИСТЕМОЙ КУРСОВОЙ УСТОЙЧИВОСТИ (VSC)
УПРАВЛЕНИЕ В СИСТЕМЕ
Ниже приведены два примера, иллюстрирующие поведение автомобиля, когда боковая сила превышает прочность сцепления шин с дорожным покрытием. Система VSC помогает контролировать поведение автомобиля, регулируя мощность двигателя и тормозное усилие на каждом из колес автомобиля в рассмотренных ниже условиях.
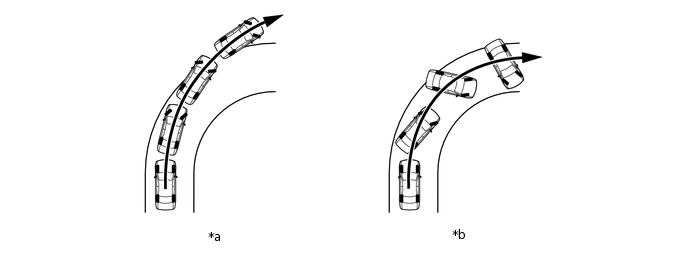
*a
Тенденция к заносу передних колес (недостаточная поворачиваемость)
передние колеса сцепляются с дорожным покрытием слабее, чем задние
*b
Тенденция к заносу задних колес (избыточная поворачиваемость)
задние колеса сцепляются с дорожным покрытием слабее, чем передние
Для распознавания характера движения автомобиля датчики определяют угол поворота рулевого колеса, скорость автомобиля, рысканье и боковое ускорение, которые затем анализируются ЭБУ системы противоскольжения.
Занос передних колес распознается по разности между расчетным и фактическим рысканьем автомобиля. Когда фактическое рысканье автомобиля меньше расчетного рысканья (вычисленного по скорости автомобиля и углу поворота), что определяется, когда водитель поворачивает рулевое колесо, это означает, что автомобиль выполняет поворот под большим углом, чем требует траектория движения. Таким образом ЭБУ системы противоскольжения распознает тенденцию к заносу передних колес.
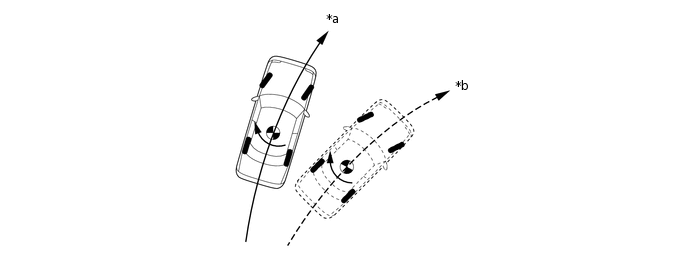
*a
Фактическая траектория движения (фактическое рысканье)
*b
Траектория движения, определенная на основе расчетного рысканья
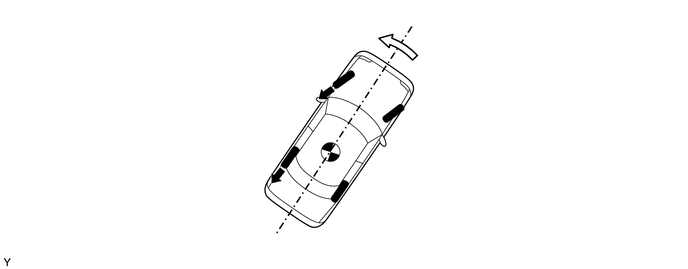
Занос задних колес определяется по значениям угла увода колес и угловой скорости скольжения автомобиля (по изменению угла бокового увода автомобиля во времени). Если угол увода колес и угловая скорость скольжения слишком велики, ЭБУ системы противоскольжения расценивает такую ситуацию как тенденцию к заносу задних колес.
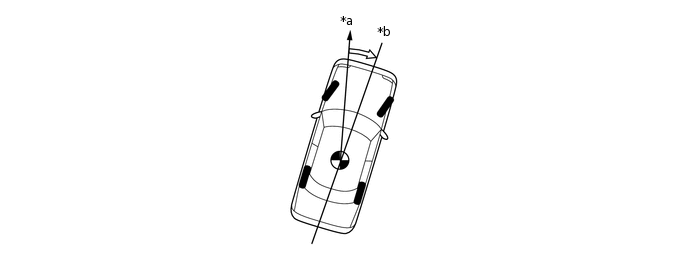
*a
Направление перемещения центра масс автомобиля
*b
Движение автомобиля

Угол увода колес
-
-
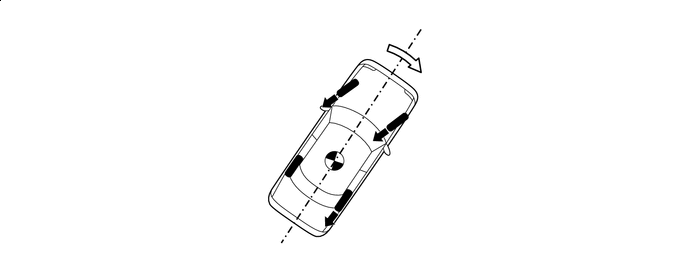
Когда ЭБУ системы противоскольжения распознает тенденцию к заносу передних или задних колес, он снижает мощность двигателя и тормозит соответствующие колеса, регулируя момент рысканья автомобиля. Ниже рассмотрены основные действия системы VSC. При этом способы управления различаются в зависимости от характеристик автомобиля и условий движения.
Когда ЭБУ системы противоскольжения распознает тенденцию к заносу передних колес, он предпринимает нейтрализующие действия в зависимости от вероятности заноса. ЭБУ системы противоскольжения регулирует мощность двигателя и тормозит передние колеса и заднее колесо, расположенное с внутренней стороны при повороте, чтобы ограничить занос передних колес.

Тормозное усилие
Управляющий момент
Когда ЭБУ системы противоскольжения распознает тенденцию к заносу задних колес, он предпринимает нейтрализующие действия в зависимости от вероятности заноса. ЭБУ системы противоскольжения тормозит переднее и заднее колеса внешнего радиуса поворота и создает направленный наружу момент инерции автомобиля, ограничивая тенденцию заноса задних колес. Наряду с уменьшением скорости автомобиля, вызванным тормозным усилием, обеспечивается прекрасная курсовая устойчивость. В некоторых случаях, если необходимо, ЭБУ системы противоскольжения тормозит задние колеса.
Тормозное усилие
Управляющий момент