HYBRID TRANSAXLE SYSTEM
-
CONSTRUCTION
-
The compound gear unit consists of the power split planetary gear unit and the motor speed reduction planetary gear unit. Each planetary ring gear is integrated with the compound gear. Furthermore, this compound gear is integrated with a counter drive gear and parking lock gear.
-
The power split planetary gear unit splits the motive force of the engine into 2 passages. One passage provides motive force to drive the wheels, and the other provides force to drive generator (MG1), so that the generator (MG1) can function as a generator.
-
The motor speed reduction planetary gear reduces the speed of motor (MG2) and amplifies its torque.
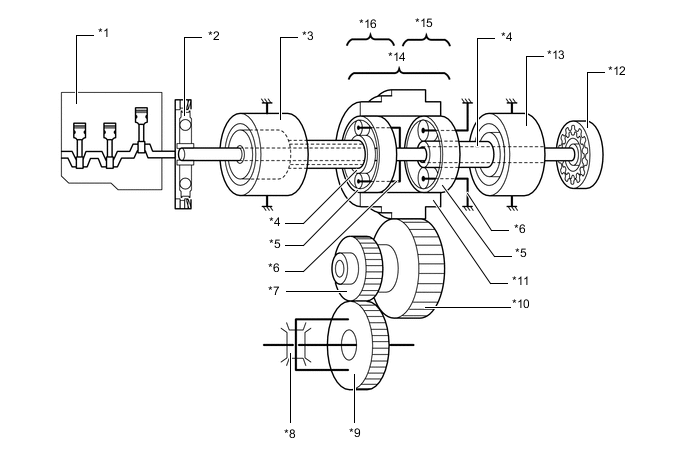
*1 Engine *2 Transmission Input Damper Assembly *3 Generator (MG1) *4 Sun Gear *5 Ring Gear *6 Carrier *7 Final Drive Gear *8 Differential Gear Unit *9 Final Driven Gear *10 Counter Driven Gear *11 Counter Drive Gear (Compound Gear) *12 Oil Pump *13 Motor (MG2) *14 Compound Gear Unit *15 Motor Speed Reduction Planetary Gear Unit *16 Power Split Planetary Gear Unit -
The connection of the sun gear, ring gear and carrier of each planetary gear unit is as shown below.
Item Connection Power Split Planetary Gear Unit Sun Gear Generator (MG1) Ring Gear Compound Gear (Output) Carrier Input Shaft (Engine) Motor Speed Reduction Planetary Gear Unit Sun Gear Motor (MG2) Ring Gear Compound Gear (Output) Carrier Fixed
-
-
OPERATION
-
Motive Force Transmission Path
-
The motive force created by the engine and motor (MG2) is transmitted by the counter drive gear of the compound gear unit, counter driven gear, final drive gear, and then differential gear unit, in order to drive the front wheels.
-
-
How to Read Nomographic Charts
-
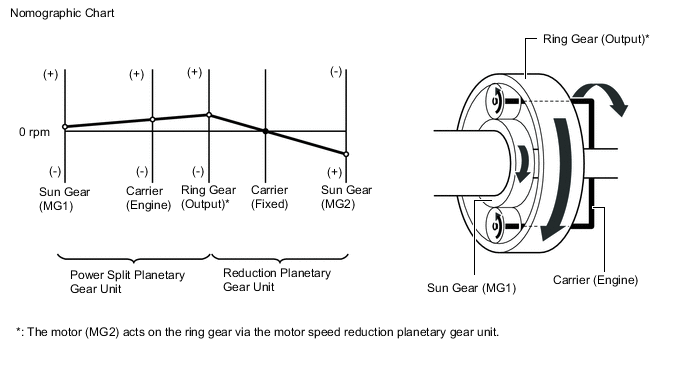
The nomographic chart below gives a visual representation of the planetary gear rotation direction, rotational speed and torque balance.
-
In the nomographic chart, a straight line is used to represent the relationship between the rotation directions and rotational speeds of the 3 gears in the planetary gear. The rotational speed of each gear is indicated by the distance from the 0 rpm point. Due to the structure of the planetary gear, the relationship between the rotational speeds of the 3 gears is always expressed by a straight line.
-
The nomographic charts and illustrations of the geartrain operation for each vehicle driving condition shown in the following descriptions are examples only. The examples shown are 'snapshots', whereas normal system operation is a constantly changing blend of conditions and system reactions to suit those conditions.
-
-
Torque and Rotation Relationship
-
In the hybrid system, the motor generators have different roles depending on the situation. Understanding the relationship between the rotation direction and torque can help to make the role of a motor generator easier to understand.
-
The table below shows the relationship of drive and electric generation for different combinations of positive or negative torque and forward or reverse rotation.
Rotation Direction Torque Condition Role of Component Forward (+) Rotation Positive Torque Drive Negative Torque Electric Generation Reverse (-) Rotation Positive Torque Electric Generation Negative Torque Drive -
As an example, if a motor generator is rotating in the forward (+) direction and it applies negative torque, it will generate electricity (producing electrical power).
-
Alternately, if the motor generator is rotating in the reverse (-) direction and it applies negative torque, it will act as a drive source (consuming electrical power).
-
-
READY ON State
-
The engine will only start if conditions of the engine coolant temperature, HV battery State Of Charge (SOC), HV battery temperature or electrical load require an engine start.
-
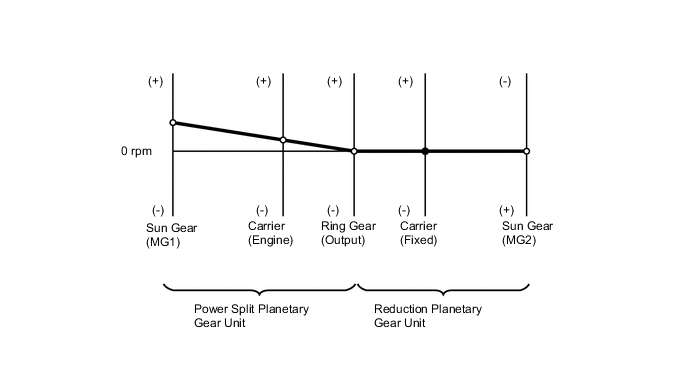
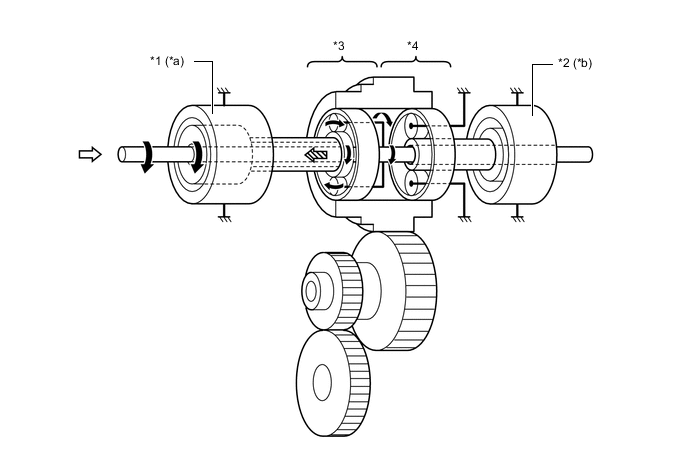
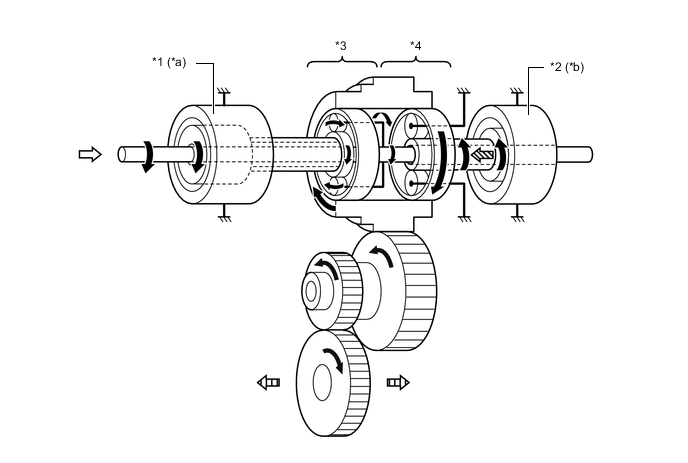
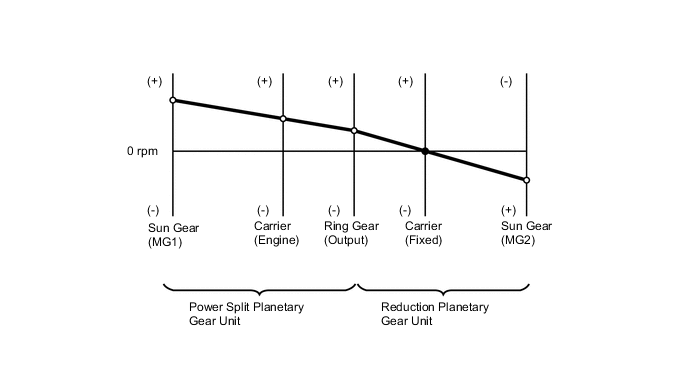
The motive force of the generator (MG1) is transmitted via the sun gear and is output to the carrier. Thus, motive force is transmitted in order to start the engine.
Figure 1. READY-ON State when Starting Engine
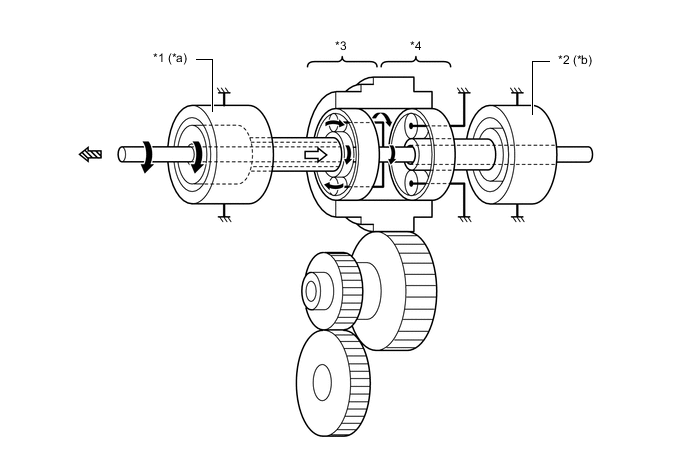
*1 Generator (MG1) *2 Motor (MG2) *3 Power Split Planetary Gear Unit *4 Motor Speed Reduction Planetary Gear Unit *a Drive *b Stopped 
Rotation Direction 
From Generator (MG1) 
To Engine - - Figure 2. Nomographic Charts
-
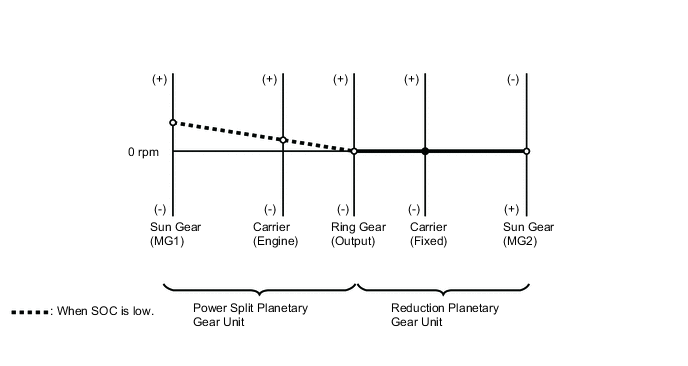
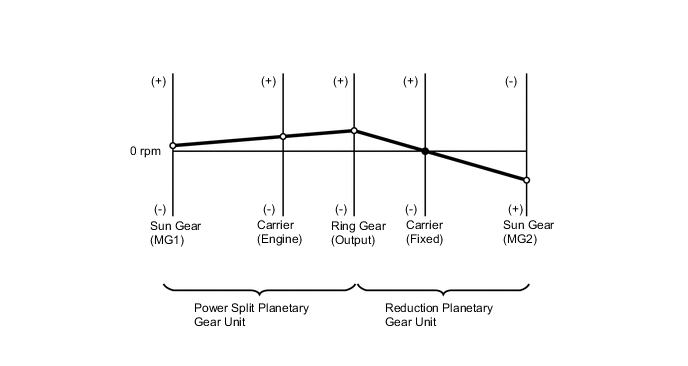
If the SOC of the HV battery is low, it is charged by the generator (MG1), which is driven by the engine.
-
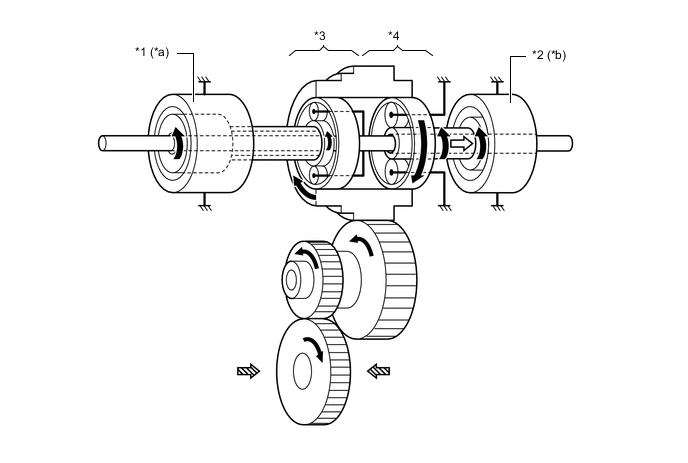
The engine motive force, which is input by the carrier, is output to the sun gear. Thus, motive force is transmitted in order to operate the generator (MG1) as a generator.
Figure 3. Charging when Stopped
*1 Generator (MG1) *2 Motor (MG2) *3 Power Split Planetary Gear Unit *4 Motor Speed Reduction Planetary Gear Unit *a Driven - Generates Electricity *b Stopped Rotation Direction From Engine To Generator (MG1) - - Figure 4. Nomographic Charts
-
-
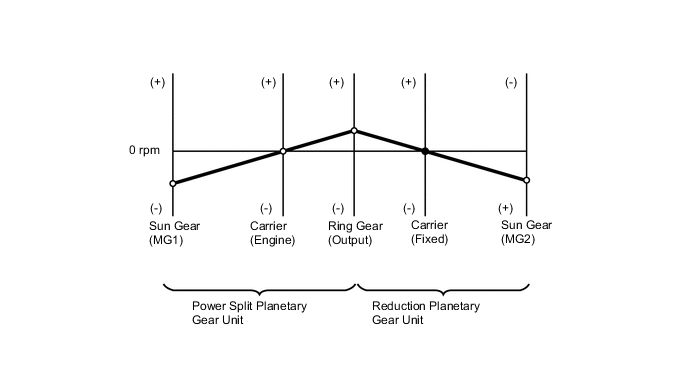
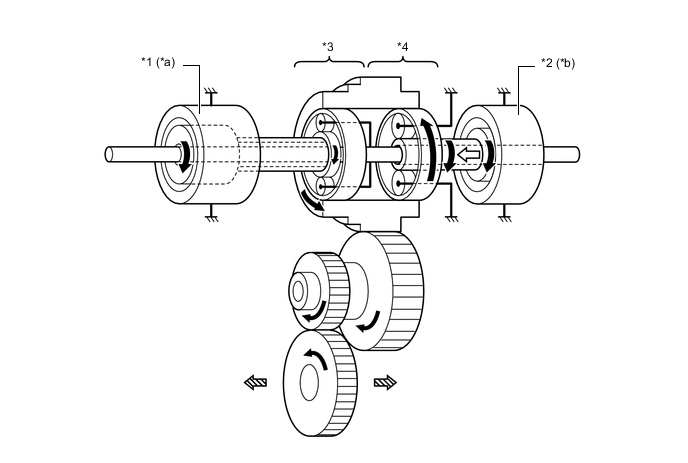
Starting Off and Low Load Cruising
-
When the vehicle starts off under normal conditions, it runs using the motive force of the motor (MG2) or MGR.
-
The motive force of the motor (MG2) is transmitted via the sun gear and is output to the ring gear in order to drive the front wheels. The carrier of the motor speed reduction planetary gear in the compound gear unit is fixed. As a result, the motor speed reduction planetary gear unit reduces the speed of the motor (MG2), increasing torque, in accordance with a set gear ratio. The motor reduction planetary gear unit changes the direction of rotation of the motor (MG2).
Figure 5. Starting Off and Low Load Cruising
*1 Generator (MG1) *2 Motor (MG2) *3 Power Split Planetary Gear Unit *4 Motor Speed Reduction Planetary Gear Unit *a Rotates Freely *b Drive Rotation Direction From Motor (MG2) To Front Wheels - - Figure 6. Nomographic Charts
-
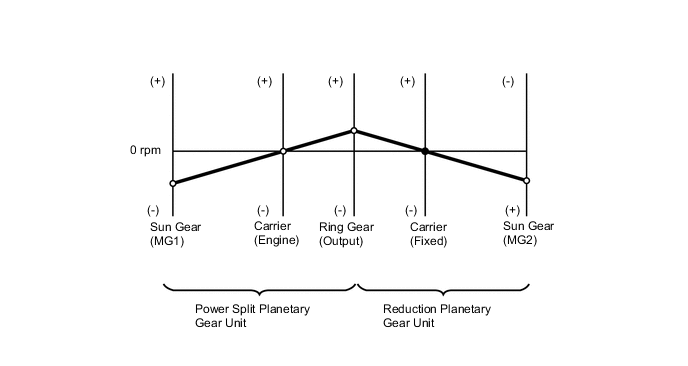
If the SOC of the HV battery is low, it is charged by the generator (MG1), which is driven by the engine. This power is also used to power the motor (MG2) or MGR.
-
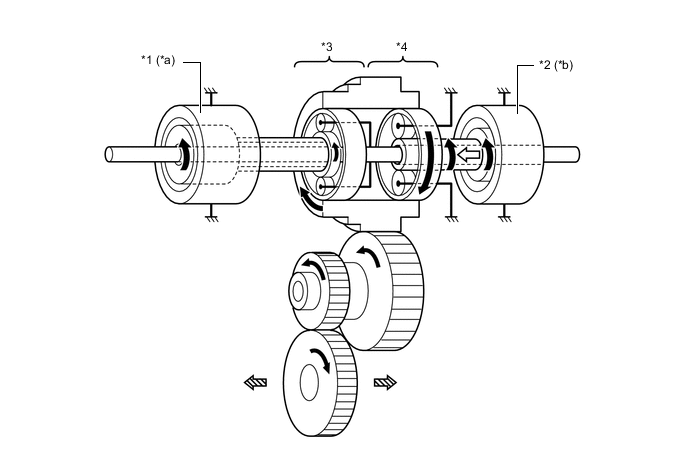
The engine motive force, which is input by the carrier, is output to the ring gear. The motive force of the motor (MG2) is output to the ring gear via the motor speed reduction planetary gear unit. The combination of these 2 motive forces is transmitted by the compound gear in order to drive the front wheels.
Figure 7. Starting Off and Low Load Cruising when SOC Low
*1 Generator (MG1) *2 Motor (MG2) *3 Power Split Planetary Gear Unit *4 Motor Speed Reduction Planetary Gear Unit *a Driven - Generates Electricity *b Drive Rotation Direction From Engine From Motor (MG2) 
To Front Wheels Figure 8. Nomographic Charts
-
-
Constant-speed Cruising
-
When the vehicle is running under low load and constant-speed cruising conditions, the engine will be operated in its most efficient range to power the vehicle.
-
The engine motive force, which is input by the carrier, is output to the ring gear. The motive force of the motor (MG2) is output to the ring gear via the motor speed reduction planetary gear unit. The combination of these 2 motive forces is transmitted by the compound gear in order to drive the front wheels.
Figure 9. Constant-speed Cruising
*1 Generator (MG1) *2 Motor (MG2) *3 Power Split Planetary Gear Unit *4 Motor Speed Reduction Planetary Gear Unit *a Driven - Amount of Electricity Generated is Low *b Drive Rotation Direction From Engine From Motor (MG2) To Front Wheels Figure 10. Nomographic Charts
-
If the SOC of the HV battery is low, more engine power is provided to increase the generation of electricity via the generator (MG1). This charges the HV battery.
Figure 11. Constant-speed Cruising when SOC Low
*1 Generator (MG1) *2 Motor (MG2) *3 Power Split Planetary Gear Unit *4 Motor Speed Reduction Planetary Gear Unit *a Driven - When SOC is Low, Greater Amount of Electricity is Generated. *b Drive Rotation Direction From Engine From Motor (MG2) To Front Wheels Figure 12. Nomographic Charts
-
-
During Full Throttle Acceleration
-
When the vehicle driving condition changes from low load cruising to full-throttle acceleration, this system supplements the motive force of the motor (MG2) or MGR with electrical power from the HV battery.
-
The engine motive force, which is input by the carrier, is output to the ring gear. The motive force of the motor (MG2) is output to the ring gear via the motor speed reduction planetary gear unit. The combination of these 2 motive forces is transmitted by the compound gear in order to drive the front wheels.
Figure 13. During Full Throttle Acceleration
*1 Generator (MG1) *2 Motor (MG2) *3 Power Split Planetary Gear Unit *4 Motor Speed Reduction Planetary Gear Unit *a Driven - Generates Electricity *b Drive Rotation Direction From Engine From Motor (MG2) To Front Wheels Figure 14. Nomographic Charts
-
-
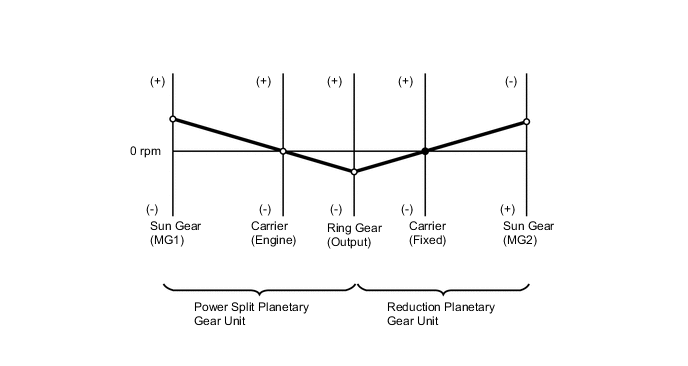
During Deceleration
-
While the vehicle is being driven with the shift lever in D and it decelerates, the engine turns off and the engine motive force output to the front wheels will be zero. At this time, the wheels drive the motor (MG2), causing the motor (MG2) to operate as a generator and charge the HV battery. While the motor (MG2) is operating as a generator, it creates resistance to the rotation of the front wheels, producing a braking effect.
-
The motive force of front wheels is transmitted via the ring gear and is output to the sun gear in order to drive the motor (MG2). The carrier of the motor speed reduction planetary gear in the compound gear unit is fixed. As a result, the motor speed reduction planetary gear unit increases the rotational speed of the motor (MG2) in accordance with a set gear ratio.
Figure 15. During Deceleration
*1 Generator (MG1) *2 Motor (MG2) *3 Power Split Planetary Gear Unit *4 Motor Speed Reduction Planetary Gear Unit *a Rotates Freely *b Driven - Generates Electricity Rotation Direction To Motor (MG2) From Front Wheels - - Figure 16. Nomographic Charts
-
-
During in Reverse
-
While the vehicle is being driven in reverse, the front wheels are driven by the motor (MG2). At this time, the motor (MG2) rotates in the reverse (-) direction, the engine is stopped, and the generator (MG1) rotates in the forward (+) direction without generating electricity.
-
The motive force of the motor (MG2) is transmitted via the sun gear and is output to the ring gear, in order to drive the front wheels. The carrier of the motor speed reduction planetary gear in the compound gear unit is fixed. As a result, the motor speed reduction planetary gear unit reduces the speed of the motor (MG2), increasing torque, in accordance with a set gear ratio. The motor reduction planetary gear unit changes the rotation direction of the motor (MG2).
Figure 17. Driving in Reverse
*1 Generator (MG1) *2 Motor (MG2) *3 Power Split Planetary Gear Unit *4 Motor Speed Reduction Planetary Gear Unit *a Rotates Freely *b Drive Rotation Direction From Motor (MG2) To Front Wheels - - Figure 18. Nomographic Charts
-
-