СИСТЕМА SFI ОПИСАНИЕ ДАТЧИК ПОЛОЖЕНИЯ КОЛЕНЧАТОГО ВАЛА И ДАТЧИК ПОЛОЖЕНИЯ РАСПРЕДВАЛА
КОНСТРУКЦИЯ
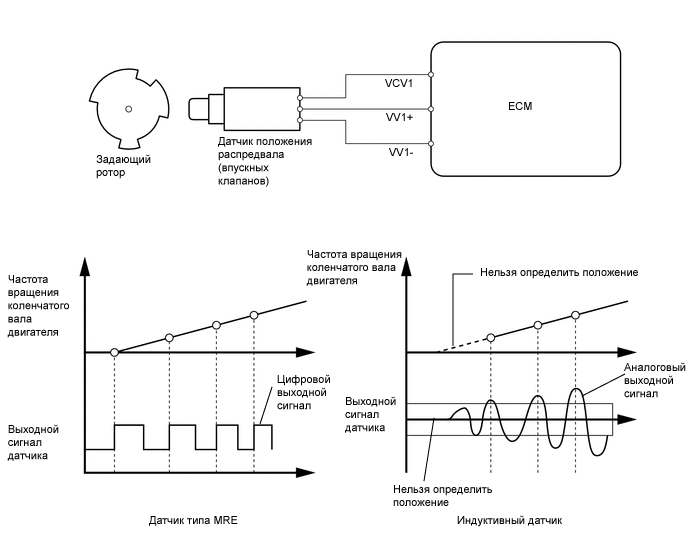
В системе управления двигателем применяется индуктивный датчик положения коленчатого вала. Задающий ротор коленчатого вала имеет 34 зубца, причем 2 зубца отсутствуют. Датчик положения коленчатого вала через каждые 10° выдает сигналы вращения коленчатого вала, а отсутствующие зубцы используются для определения верхней мертвой точки.
Для управления двигателем также применяются датчики положения распредвалов впускных и выпускных клапанов типа MRE (магнитный резистивный элемент). Положение каждого распредвала впускных и выпускных клапанов определяется по вращению задающего ротора распредвала, которое используется для генерации 3 импульсов (3 состояния высокого уровня и 3 состояния низкого уровня) на каждые 2 оборота коленчатого вала.
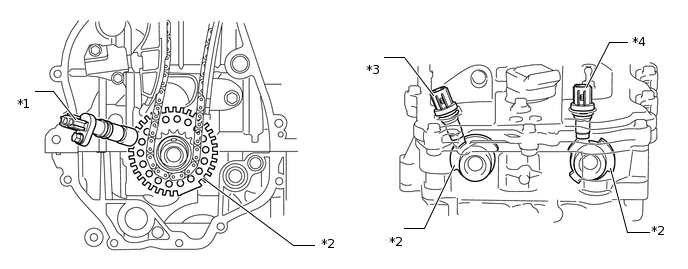
*1
Датчик положения коленчатого вала
*2
Задающий ротор
*3
Датчик положения распредвала (выпускных клапанов)
*4
Датчик положения распредвала (впускных клапанов)
Figure 1. Формы выходных сигналов датчиков 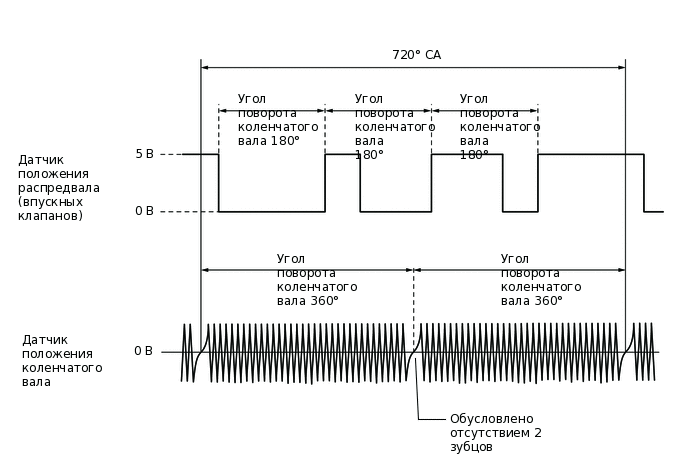
Датчик положения распредвала типа MRE состоит из магнитного резистивного элемента, магнита и чувствительного элемента. Из-за особенностей профиля (выступающих и невыступающих частей) задающего ротора, вращающегося рядом с чувствительным элементом, изменяется направление вектора напряженности магнитного поля. В результате изменяется сопротивление магнитного резистивного элемента, и происходит переключение уровня выходного напряжения, подаваемого на ECM. На основе этого напряжения ECM определяет положение распредвала.
Ниже перечислены различия между датчиками положения распредвала типа MRE и индуктивными датчиками, используемыми в обычных моделях:
Позиция
Тип датчика
MRE
Индуктивный
Выходной сигнал
Цифровой выходной сигнал датчика выдается начиная с малых частот вращения коленчатого вала двигателя.
Аналоговый выходной сигнал изменяется в зависимости от частоты вращения коленчатого вала двигателя.
Определение положения распредвала
Определение положения осуществляется в результате сопоставления временных характеристик сигналов NE с моментами переключения уровня выходного сигнала датчика, обусловленного наличием выступающих частей на задающем роторе, либо исходя из числа сигналов NE, поступивших во время выдачи высокого/низкого уровня.
Определение положения осуществляется путем сравнения сигналов NE с сигналами, выдаваемыми в моменты прохождения выступающих частей задающего ротора.