PRE-COLLISION SYSTEM(for Stereo Camera Type)
-
CONSTRUCTION
-
The front side radar sensor consists of a radar circuit and signal processing circuit.
-
The radar uses frequencies in the 24 GHz band.
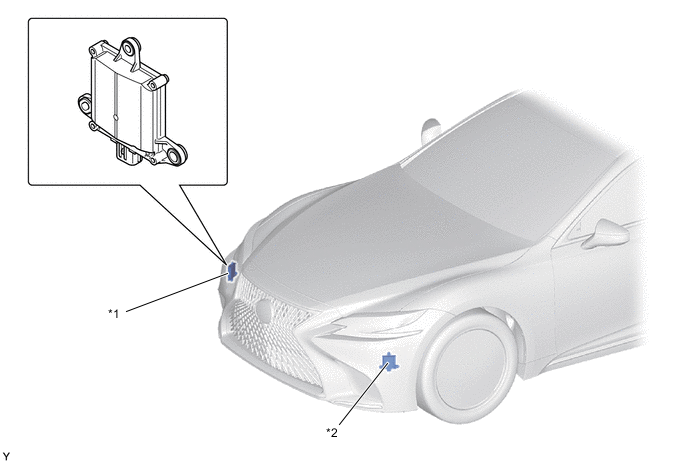
*1 Front Side Radar Sensor RH *2 Front Side Radar Sensor LH -
The distance to the object, azimuth and relative speed are calculated from the information that is provided by the reflected radar as described below:
Item Calculation Method Distance Calculated from the length of time that has elapsed from the time when the waves of the radar are emitted until when the reflected waves are received by the radar circuit. The distance is approximately 70 m (230 ft.). Azimuth Calculated from the reception angle of the radar reflections received. The detection angle has a horizontal range of approximately 150° and a vertical range of approximately 20°. Relative Speed Calculated by utilizing the change (Doppler effect*) that occurs in the frequency of the reflected wave from the radar sensor. Tech Tips
*: The Doppler effect causes the observer to perceive the radio waves emitted by a moving object to be a higher frequency as it approaches, and to be a lower frequency as it recedes. This phenomenon is created because when an object is located far away, the radio waves are perceived at higher frequencies than those of the radio source. An SST is used if radar axis confirmation is needed. For details, refer to the Repair Manual.
-