LANE TRACING ASSIST SYSTEM
-
OUTLINE
-
The Lane Tracing Assist (LTA) system uses a camera sensor installed on the top of the windshield glass to recognize lane markers when driving on highways or controlled-access highways marked with lane markers. The LTA system also uses the camera sensor, millimeter wave radar sensor assembly and blind spot monitor sensor to recognize preceding and surrounding vehicles, as well as to provide information to the driver, performing steering assistance according to road or driving conditions.
-
The LTA system uses the camera sensor to recognize the lane markers on roads and the driving path of the preceding vehicle when using dynamic radar cruise control system, and also uses the electrical power steering system to assist with a portion of steering wheel operation required for driving along the current lane according to the road shape and the driving path of the preceding vehicle, reducing the load on the driver.
-
The following functions in the LTA system operate according to switch operation and driving conditions.
System Name and Function Availability Package Name Lexus Safety System +A System Name Lane Tracing Assist Abbreviation LTA Lane Departure Alert Function Lane Marker ○ Lane Boundary* ○ Steering Assist Function Lane Marker ○ Lane Boundary* ○ Vehicle Sway Warning Function ○ Lane Centering Function Lane Marker ○ Driving Path of Preceding Vehicle ○ *: Boundary between asphalt area and grass, dirt, curbs, etc.
-
-
PRECAUTION
-
LTA System Handling Precautions
-
The LTA system provides information to the driver and performs steering assistance according to road and driving conditions. The driver cannot take his or her hands off from the steering wheel while the system is operating, so the driver must not trust solely in the system, and must always remain aware of surrounding conditions and the direction the vehicle is headed, operate the steering wheel to adjust the vehicle's path and ultimately be responsible for driving in any case.
-
The LTA system uses a camera sensor to recognize lane markers and lane boundaries, and operates by using the camera sensor, millimeter wave radar sensor assembly and blind spot monitor sensor to recognize preceding and surrounding vehicles. The LTA system does not operate if it cannot recognize lane markers, lane boundaries or the path of the preceding vehicle. Also, since an unnecessary steering force could be applied, or steering wheel vibrations or warning sounds may be produced when lane markers, lane boundaries or preceding vehicles are not recognized properly, make sure to drive appropriately using the steering wheel even when using the system. However, the steering force generated is small and does not interfere with operation of the vehicle.
-
The lane departure alert function and lane departure control function operate when the LTA main switch is on, and lane markers or lane boundaries are recognized when driving at or above the system operation vehicle speed. However, the systems may not operate (or may stop operating) depending on road or driving conditions.
-
The LTA system assumes use on highways or controlled-access highways. Do not use the LTA system on general roads.
-
The lane keeping assist function uses the path of the preceding vehicle to help the driver to follow the preceding vehicle, when traffic, etc. makes it difficult or impossible to see lane markers. If the preceding vehicle travels along the left or right side of the lane or changes lanes, the own vehicle could follow the preceding vehicle, and either travel along the side of the lane or jut out from it. If the preceding vehicle is swaying, the own vehicle could also sway or even jut out from the lane, so caution is required.
-
If the system detects some kind of malfunction, it notifies the driver by buzzer and display, and then the system stops. However, the vehicle can be driven normally. If the system reports a malfunction after restarting the hybrid system, have the vehicle inspected.
-
If not using the LTA system in order to prevent incorrect operation, turn the system off with the LTA main switch.
-
When zero point calibration has not been completed on the steering sensor, the LTA system doesn't work.
-
Do not use the LTA system under the following conditions. Doing so could cause the system to operate improperly or could even lead to an unforeseen accident.
-
When the preceding vehicle changes lanes while the system is displaying that this vehicle is following the vehicle (this vehicle could follow the preceding vehicle and change lanes).
-
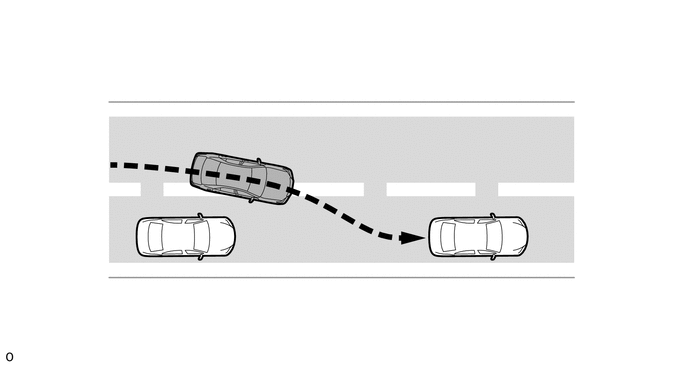
When the preceding vehicle is swaying while the system is displaying that this vehicle is following the vehicle (this vehicle could also sway or even jut out from the lane).
-
When the preceding vehicle travels along the left or right side of the lane while the system is displaying that this vehicle is following the vehicle (this vehicle could follow the preceding vehicle, and either travel along the side of the lane or jut out from it).
-
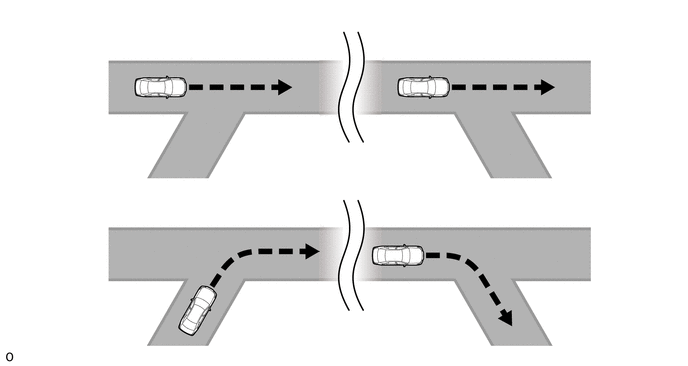
When driving through a junction or merging.
-
When driving on a repaired road on which there are traces of asphalt repair or old lane markers.
-
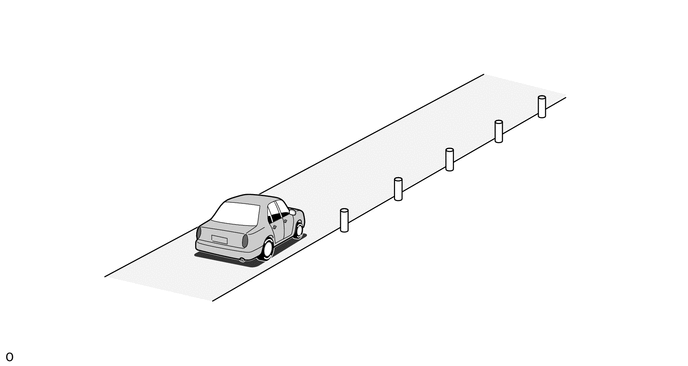
When driving on a road where structures or patterns on the side of the road could be mistaken as lane markers (such as guard rails, curbs or reflective poles).
-
When driving around a sharp curve.
-
When driving on a slippery road (due to rain, snow, freezing, etc.).
-
When driving on a snow-covered road.
-
When driving on a road where lane markers are difficult to see due to puddles, rain, clouds, fog, dust, etc.
-
When driving on lanes regulated due to construction or on temporary lanes.
-
When using a spare tire, snow chains, etc.
-
When tires have insufficient tread depth or air.
-
When using tires with different structures, manufacturers, brands or tread patterns.
-
When driving in lanes other than on highways or controlled-access highways.
Figure 1. Road Conditions that could be Incorrectly Recognized as Lane Markers
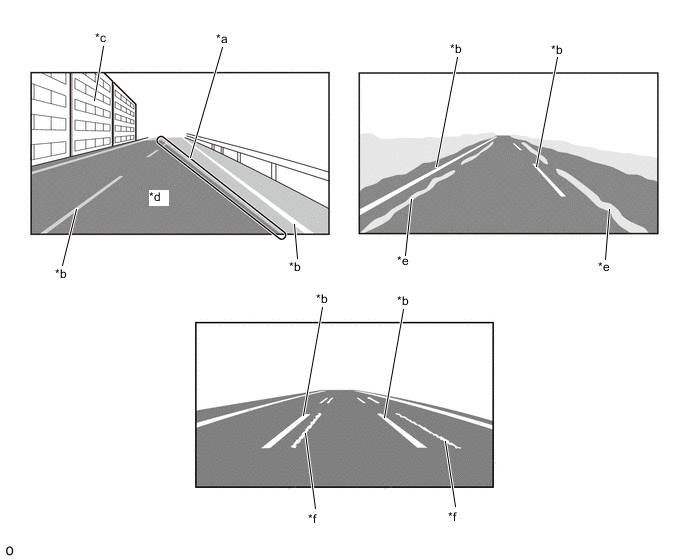
*a Edge of Shadow that could be Incorrectly Recognized as Lane Marker *b Lane Marker that should be Detected *c Structure *d Shadow of Structure *e Snow that could be Incorrectly Recognized as Lane Marker *f Trace of Erased Lane Marker that could be Incorrectly Recognized as Lane Marker -
-
Functions may not operate correctly when driving at excessively high speeds.
-
-
Camera Sensor Handling Precautions
-
It may be difficult or impossible for the camera sensor to recognize lane markers, lane boundaries or the path of the preceding vehicle, in the following surrounding environments.
-
When forward visibility is poor due to bad weather (rain, snow, fog, dust, dust clouds, blizzards, etc.).
-
When water, snow or dust is kicked up by a nearby vehicle, or when visibility is poor due to water vapor, sand, smoke, etc.
-
When the vehicle is exposed to powerful light from ahead, such as strong sunlight or the high beams of an oncoming vehicle.
-
In insufficiently bright environments, such as driving at night or in a tunnel.
-
When the headlights on this vehicle are not illuminated even at night or while driving in a tunnel.
-
When a surrounding surface is a single color (such as snowy landscape) and there is not enough contrast.
-
When the road grade changes suddenly (a sudden upward or downward slope).
-
When the amount of light changes suddenly, such as at the end of a tunnel.
-
When the top part of the windshield glass is foggy due to low temperatures.
-
When the vehicle-to-vehicle distance with the preceding vehicle is extremely close.
-
-
The camera sensor may not sufficiently recognize lane markers, lane boundaries or the path of the preceding vehicle in the following conditions.
-
When the vehicle is overloaded.
-
When the height of the vehicle has been adjusted (for example, the suspension has been modified or the tire size has been changed).
-
When matter such as snow, ice, dirt, frost, dust or oil is adhering to the windshield glass.
-
When the windshield is fogged up.
-
When the windshield glass has not been sufficiently cleaned during or after using windshield washer.
-
When lane markers cannot be completely recognized because raindrops, windshield washer fluid or wiper blades are blocking the visibility of the camera sensor.
-
When the windshield glass in front of the camera sensor is scratched.
-
When a canoe or other object is loaded on the roof, blocking the visibility of the camera sensor.
-
When dirt, ice and snow or mud is adhering to the headlights, and [it is difficult to recognize lane markers because they are not properly illuminated].
-
When the optical axis of the headlights is misaligned, and [it is difficult to recognize lane markers because they are not properly illuminated].
-
When the headlights, fog lights or other lights have been modified.
-
-
Since there are limits to camera sensor performance, the camera sensor may be unable to recognize lane markers, lane boundaries or the path of the preceding vehicle in the following conditions.
-
If the camera sensor become misaligned or warped due to an impact.
-
If the temperature inside the vehicle is very hot or cold (for example, if left in blazing heat or freezing cold).
-
Immediately after starting the hybrid system.
-
-
Make sure to observe the following precautions when handling the camera sensor.
-
Do not subject the camera sensor to strong impact or force.
-
Do not remove or disassemble the camera sensor.
-
Do not change the installation location of the camera sensor or modify surrounding parts.
-
Never touch the lens of the camera sensor when replacing it or under any other situation. If the lens is touched, use a soft cloth, etc. to clean it without scratching it.
-
-
Make sure to observe the following precautions regarding parts surrounding the camera sensor.
-
Install only genuine wiper blades, as using non-genuine parts could impact the visibility of the camera sensor and prevent the system from operating properly.
-
The camera sensor may become unable to reliably perform recognition and the system may not operate normally if the wiping marks are left on the windshield. Be sure to replace the wiper blades quickly.
-
Do not install accessories on the front of the vehicle (such as on the hood or grille), as doing so could impact the visibility of the camera sensor and prevent the system from operating properly.
-
Make sure that cargo loaded on the roof of the vehicle does not enter the range of visibility of the camera sensor, as this could impact the visibility of the camera sensor and prevent the system from operating properly.
-
Always keep the windshield glass clean. If the windshield glass is foggy, dirty or oily, the camera sensor may become unable to reliably perform recognition and the system may not operate normally.
-
Do not attach stickers or install accessories to the windshield glass, as doing so could impact the visibility of the camera sensor and prevent the system from operating properly. If an accessory must be installed, make sure that it does not cover the front of the camera sensor.
-
Even if the windshield glass is coated with glass coating, if there is water on the front of the camera sensor, wipe it off.
-
If the windshield glass is scratched of cracked, replace it.
-
When replacing the windshield glass, be sure to replace it with a genuine windshield that has a camera sensor bracket installed.
-
-
-
Blind Spot Monitor Sensor Handling Precautions
-
The following types of vehicles and objects are not detected.
-
Small motorcycles*
-
Vehicles traveling in the opposite direction.
-
Guardrails, walls, signs, parked vehicles and similar stationary objects.*
-
Following vehicles that are in the same lane.*
-
Vehicles traveling 2 lanes away from own vehicle.
Tech Tips
*: Depending on conditions, detection of a vehicle and/or object may occur.
-
-
Under the following conditions, the system may not effectively detect vehicles, and the warning may not operate when operating the turn signal lights even if a vehicle is approaching.
-
When the sensor is misaligned due to a strong impact to the sensor or its surrounding area.
-
When mud, snow, ice, a sticker, etc. is covering the sensor or surrounding area on the bumper.
-
When driving on a road surface that is wet with standing water during bad weather such as heavy rain, snow, or fog.
-
When multiple vehicles are approaching with only a small gap between each vehicle.
-
When the distance between own vehicle and a following vehicle is short.
-
When there is a significant difference in speed between own vehicle and the vehicle that enters the detection area.
-
When the difference in speed between own vehicle and another vehicle is changing.
-
When a vehicle enters a detection area traveling at approximately the same speed as own vehicle.
-
As own vehicle starts from a stop, a vehicle remains in the detection area.
-
When driving up and down consecutive steep inclines, such as hills, dips in the road, etc.
-
When driving on roads with sharp bends, consecutive curves, or uneven surfaces.
-
When vehicle lanes are wide, or when driving on the edge of a lane, and the vehicle in an adjacent lane is far away from own vehicle.
-
When an accessory (such as a bicycle carrier) or towing eyelet is installed to the rear of the vehicle.
-
When there is a significant difference in height between own vehicle and the vehicle that enters the detection area.
-
-
Under the following conditions, unnecessary sensor detection could cause the steering assist function to operate when operating the turn signal lights even if no vehicle is approaching.
-
When the sensor is misaligned due to a strong impact to the sensor or its surrounding area.
-
When the distance between own vehicle and a guardrail, wall, etc. that enters the detection area is short.
-
When driving up and down consecutive steep inclines, such as hills, dips in the road, etc.
-
When vehicle lanes are narrow, or when driving on the edge of a lane, and a vehicle traveling in a lane other than the adjacent lanes enters the detection area.
-
When driving on roads with sharp bends, consecutive curves, or uneven surfaces.
-
When the tires are slipping or spinning.
-
When the distance between own vehicle and a following vehicle is short.
-
When an accessory (such as a bicycle carrier) or towing eyelet is installed to the rear of the vehicle.
-
-
-
Steering Wheel Grip Detection Sensor Handling Precautions
-
Under the following conditions, steering wheel grip detection performance may suffer or detection may become impossible.
-
If a cover is attached to the steering wheel assembly.
-
If the driver is wearing gloves.
-
If foreign matter is adhered to the steering wheel assembly.
-
-
Under the following conditions, the system may mistakenly detect that steering wheel is being held.
-
If an object other than the driver's hand is touching the steering wheel assembly.
-
If an object, arm, etc. is near a large portion of the steering wheel assembly.
-
-
-