DYNAMIC REAR STEERING
-
CONSTRUCTION
-
The rear steering link assembly consists of a motor, reduction mechanism and rear steering sensor.
-
A low inertia, low noise and high output brushless type motor is used.
-
The rear steering link assembly operates based on the steering amount calculated by the front steering control ECU, in accordance with the signal from the rear steering control ECU.
-
The rear steering sensor detects the absolute position of the rear wheel turning angle using a resolver sensor.
-
A gear mechanism is used to convert the stroke of the rear steering rod into the rotation of the rear steering sensor, detecting the position of the rear steering rod.
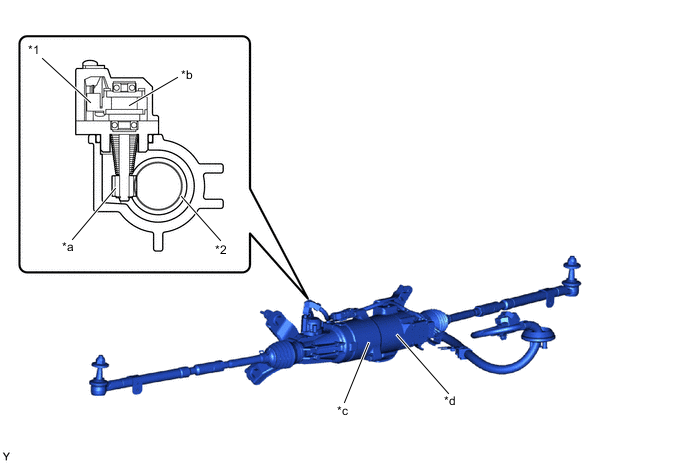
*1 Rear Steering Sensor *2 Rear Steering Rod *a Gear Mechanism Portion *b Resolver Sensor Portion *c Reduction Mechanism Portion *d Motor Portion Note
Make sure to jack the vehicle up when forcibly driving the motor in the rear steering link assembly using the Global TechStream (GTS).
-
Motor and Reduction Mechanism
-
The motor is located on the same axis as the rear steering rod and consists of a rotation angle sensor, rotor and stator.
-
A planetary gear is used for the reduction mechanism. A sun gear is located at the end of the rotor to reduce the rotation speed of the motor.
-
The rotation of the carrier is transmitted to the rear steering nut. The rotation of the rear steering nut moves the rear steering rod, steering the rear wheels.
-
The shape and location of the rear steering nut have been optimized, ensuring high efficiency and strength, and enhanced holding force in reaction to opposing forces from the road surface.
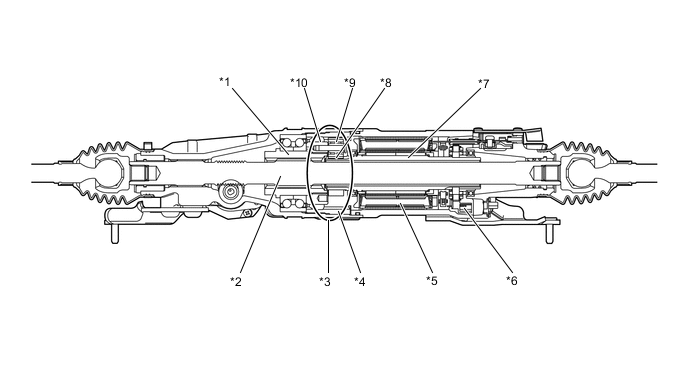
*1 Rear Steering Nut *2 Rear Steering Rod *3 Reduction Mechanism *4 Ring Gear *5 Stator *6 Rotation Angle Sensor *7 Rotor *8 Sun Gear *9 Planetary Gear *10 Carrier
-
-
-