CAN COMMUNICATION SYSTEM
-
GENERAL
-
Controller Area Network (CAN) communication, which makes high-speed communication possible, is used as a multiplex communication system* to simplify vehicle wire harnesses and achieve high-speed communication.
CAN Specifications Protocol Specifications Communication Speed 500 kbps Communication Wire Twisted-pair Wire Drive Type Differential Voltage Drive Data Length 1 - 8 Byte (Variable) Tech Tips
*: The multiplex communication system connects several ECUs together with one communication line so that they can exchange data with each other. As a result, additional wiring is not required when integrating systems and adding functions.
-
Communication Wire
-
A twisted pair of wires is used for CAN communication.
Communication Wire Outline Twisted-pair Wire 
This communication wire is a pair of twisted wires. Communication is driven by applying different voltages to the 2 lines in order to send a single signal. The bus line has a high line (2.5 V to 3.5 V of voltage is applied) and a low line (1.5 V to 2.5 V of voltage is applied). This system, which is called a "differential voltage drive", reduces noise. 
*1 Twisted-pair Wire *2 Differential Voltage Drive
-
-
A CAN* communication system is used to send information and data for multiple items, which have been converted into digital signals by the communication circuit, over one communication line (twisted-pair wire). As a result, the communication systems connected to the input systems (such as sensors and switches), control units and output systems (such as motors), achieve simplified vehicle wire harnesses.
Tech Tips
*: CAN, an abbreviation of "Controller Area Network", is an ISO (International Organization for Standardization)-compliant serial communication.
-
The CAN communication system consists of a pair of two communication lines (buses), CAN-High and CAN-Low. The system uses the differential voltage of the communication lines to determine the bus level* and transmits a digital signal at 500 kbps using an exclusive communication protocol (communication rules).
Tech Tips
*: The bus level has a dominant level and a recessive level, and the CAN communication system logically calculates the dominant level as "0" and the recessive level as "1".

-
The terminating resistors for each bus are located as shown in the following table.
Bus Terminating Resistor Location Gateway Function Gateway Destination Bus 1
-
Central Gateway ECU
-
No. 4 CAN Junction Terminal
Central Gateway ECU
-
To Bus 2
-
To Bus 3
-
To Bus 4
-
To Bus 5
-
To V Bus
Bus 2
-
Central Gateway ECU
-
ECM
Central Gateway ECU
-
To Bus 1
-
To Bus 3
-
To Bus 4
-
To Bus 5
-
To V Bus
Bus 3
-
Central Gateway ECU
-
No. 5 CAN Junction Terminal
Central Gateway ECU
-
To Bus 1
-
To Bus 2
-
To Bus 4
-
To Bus 5
-
To V Bus
Bus 4
-
No. 2 CAN Junction Terminal
-
No. 3 CAN Junction Terminal
Central Gateway ECU
-
To Bus 1
-
To Bus 2
-
To Bus 3
-
To Bus 5
-
To V Bus
Bus 5
-
Central Gateway ECU
-
Combination Meter Assembly
Central Gateway ECU
-
To Bus 1
-
To Bus 2
-
To Bus 3
-
To Bus 4
-
To V Bus
Chassis Local Bus
-
Central Gateway ECU
-
No. 1 CAN Junction Terminal
- - V Bus
-
Central Gateway ECU
Central Gateway ECU
-
To Bus 1
-
To Bus 2
-
To Bus 3
-
To Bus 4
-
To Bus 5
-
-
CAN Communication Protocol (Communication Rules)
-
The CAN communication system is a type of multiplex communication system that uses one communication line for all devices that make up the network and makes it possible to send and receive data while offsetting the communication timing. In order to do so, communication is performed according to a communication protocol (communication rules) that is shared by the devices. This communication protocol helps communication be performed smoothly and securely.
-
The CAN communication protocol uses the Carrier Sense Multiple Access with Collision Detection (CSMA/CD) protocol* as the rules for sending data via the communication line. This protocol allows all devices to share one communication line while retaining the right to start sending data.
Tech Tips
*: This is a type of communication access control where devices constantly detect the condition of the communication line and only send data when no other data is being sent. In addition, when the system detects that a data collision has occurred (data was simultaneously sent from another device), it waits for a certain period of time before resending the data.
-
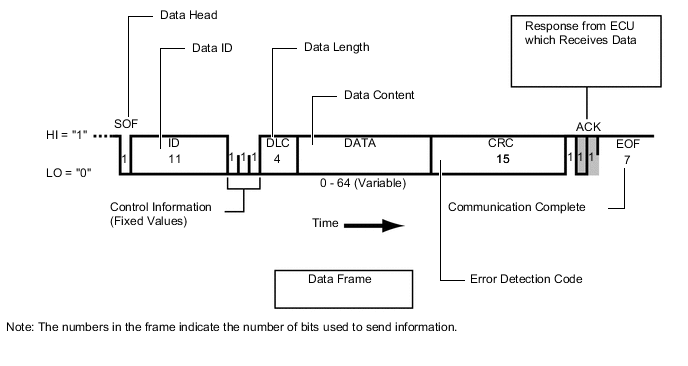
Data used by the CAN communication system is composed of a single frame that includes parts such as "ID", "DLC", "DATA", "CRC" and "ACK".
-
-
A diagnostic tool can be connected to perform diagnostic communication. Refer to the Repair Manual for details.
-