POWER STEERING SYSTEM
-
CONSTRUCTION
-
A Hall IC type power steering torque sensor is used.
-
The power steering torque sensor is built into the steering column assembly. A multipole magnet is mounted on the input shaft, and a yoke is mounted on the output shaft. The input and output shafts are joined by the torsion bar. A magnetic convergence ring assembly is placed outside of the yoke.
-
The magnetic convergence ring assembly contains 2 Hall ICs, which face opposite to each other. The system detects the steering direction in accordance with the direction of the magnetic flux that passes between the Hall ICs. Furthermore, the system detects the steering torque in accordance with the amount of change in the magnetic flux density based on the relative displacement of the multipole magnet and the yoke. The power steering ECU monitors the torque sensor signals output by the 2 Hall ICs to detect malfunctions.
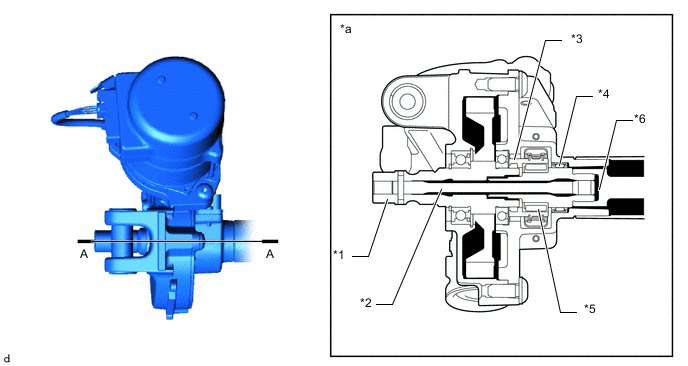
*1 Output Shaft *2 Torsion Bar *3 Yoke *4 Magnetic Convergence Ring Assembly *5 Multipole Magnet *6 Input Shaft *a A-A Cross Section - - 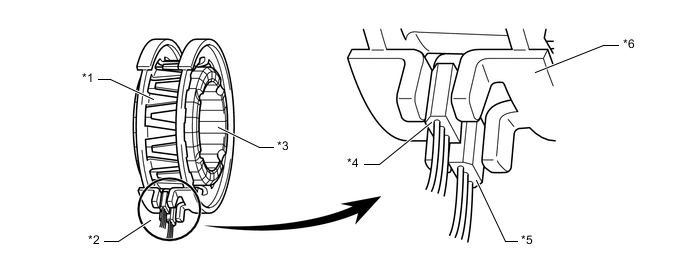
*1 Yoke *2 Power Steering Torque Sensor *3 Multipole Magnet *4 Hall IC 2 *5 Hall IC 1 *6 Magnetic Convergence Ring Assembly Figure 1. Fluctuation of Magnetic Flux Density that Passes through Hall IC
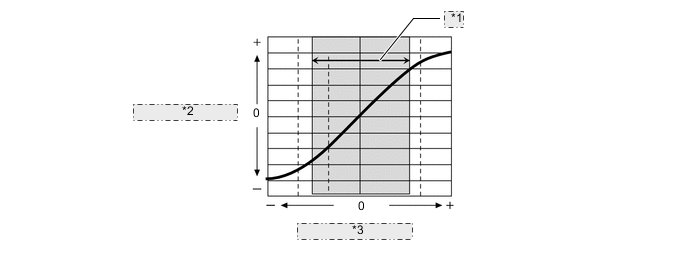
*1 Range of Use *2 Output Voltage (V) *3 Steering Torque (Nm)
-