СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ
-
УПРАВЛЕНИЕ В СИСТЕМЕ
-
Системы АБС и TRC содействуют обеспечению устойчивости автомобиля в основном при торможении и разгоне, тогда как система VSC обеспечивает курсовую устойчивость автомобиля. В зависимости от условий дорожного покрытия, скорости автомобиля, внезапных маневров рулевого управления и других внешних воздействий может произойти сильная недостаточная или избыточная поворачиваемость. В этой ситуации система VSC управляет тормозным усилием каждого колеса и тяговым усилием ведущих колес, чтобы снизить недостаточную или избыточную поворачиваемость и обеспечить устойчивость автомобиля.
-
Система VSC использует сигналы от различных датчиков, таких как датчик рысканья для определения состояния автомобиля для управления давлением тормозной жидкости и крутящим моментом двигателя.
-
Если сцепление с дорожным покрытием в поперечном направлении превышено, могут происходить следующие ситуации.
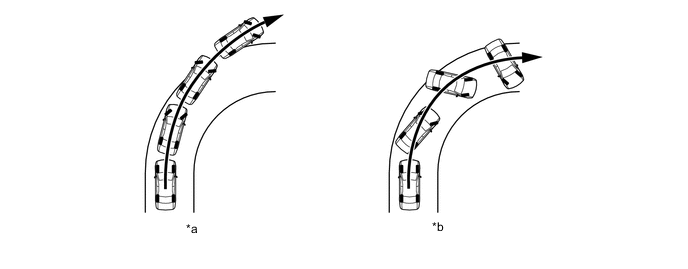
*a Недостаточная поворачиваемость
-
Передние колеса пробуксовывают чаще, чем задние
*b Избыточная поворачиваемость
-
Задние колеса пробуксовывают чаще, чем передние
-
-
-
Оценка значительной недостаточной поворачиваемости
-
ЭБУ системы противоскольжения определяет недостаточную поворачиваемость автомобиля исходя из заданной скорости рыскания и фактической скорости рыскания. Если во время поворота рулевого колеса водителем фактическая скорость рыскания автомобиля, определенная на основании скорости автомобиля, и угол поворота рулевого колеса ниже, чем заданная скорость рысканья, ЭБУ системы противоскольжения определяет недостаточную поворачиваемость автомобиля в результате недостаточной скорости поворота.
Figure 1. Оценка недостаточной поворачиваемости
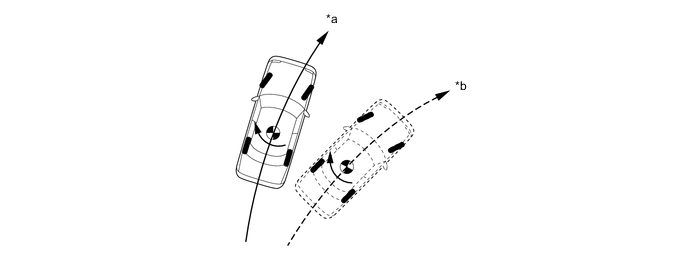
*a Фактическая траектория автомобиля (фактическая скорость рысканья) *b Траектория движения автомобиля, определенная на основе заданной скорости рысканья
-
-
Оценка значительной избыточной поворачиваемости
-
ЭБУ системы противоскольжения определяет избыточную поворачиваемость автомобиля на основании угла увода колес и угловой скорости скольжения. Если угол увода колес и угловая скорость скольжения слишком высоки, ЭБУ системы противоскольжения расценивает такую ситуацию как избыточную поворачиваемость автомобиля.
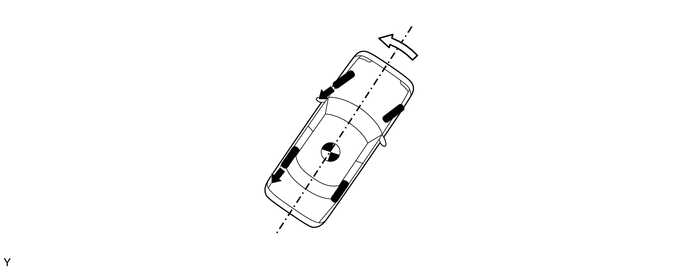
Figure 2. Оценка избыточной поворачиваемости
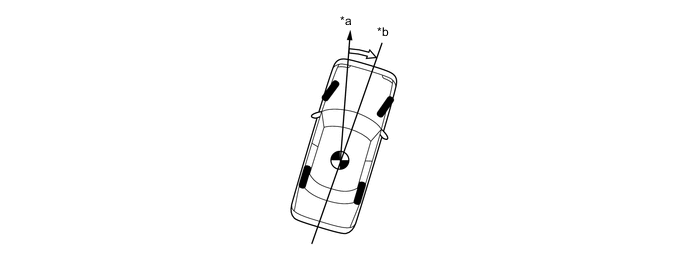
*a Траектория центра масс автомобиля *b Продольная осевая линия автомобиля 
Угол увода колес - -
-
-
Способ управления системы VSC
-
Если ЭБУ системы противоскольжения определяет недостаточную поворачиваемость автомобиля, ЭБУ системы противоскольжения ограничивает тяговое усилие и обеспечивает управление тормозным усилием каждого колеса, чтобы создать момент, при котором недостаточная поворачиваемость снижается.
Figure 3. Управление при недостаточной поворачиваемости

Тормозное усилие Управляющий момент -
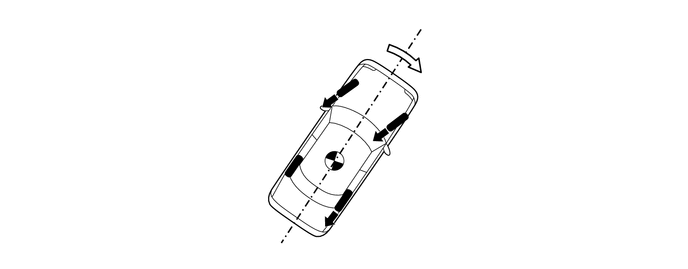
Если ЭБУ системы противоскольжения определяет избыточную поворачиваемость автомобиля, ЭБУ системы противоскольжения обеспечивает первичное управление тормозным усилием наружных колес, чтобы создать момент по направлению к наружной траектории поворота, при котором избыточная поворачиваемость снижается. Данное управление обеспечивает устойчивость автомобиля с одновременным снижением скорости.
Figure 4. Управление при избыточной поворачиваемости
Тормозное усилие Управляющий момент
-
-