BRAKE CONTROL SYSTEM
-
SYSTEM CONTROL
-
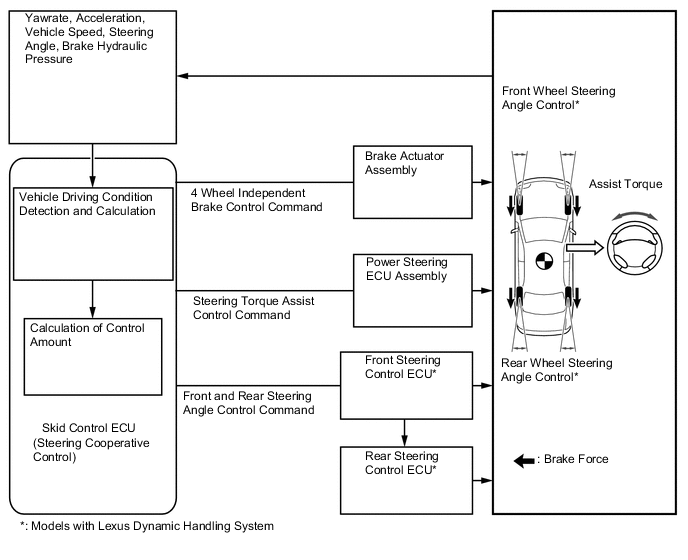
Steering cooperative control performs coordinated control using both brake control, and steering torque assist control by the Electric Power Steering (EPS) system. By integrating these functions, excellent driving stability and maneuverability are ensured.
-
On models with the Lexus Dynamic Handling (LDH) system, due to cooperative control with front wheel steer angle control by the Variable Gear Ratio Steering(VGRS) and rear wheel steer angle control by the Dynamic Rear Steering (DRS), higher driving stability is ensured.
-
If the vehicle loses stability due to wheel slippage, this function performs brake control by applying brake pressure to each individual wheel while at the same time, steering torque assist control, front wheel steer angle control and rear wheel steer angle control are performed together to facilitate the driver's steering maneuver.
Figure 1. Concept Image of Steering Cooperative Control
-
Brake Force Control on Roads with High and Low Friction Coefficient
-
When braking suddenly on a split friction road, such as with the right tires on asphalt and the left tires on snow, due to a difference of brake force between the left and right, the vehicle tends to deflect toward the higher friction side. In this state, the vehicle is controlled to steer in a direction that restrains moment generated due to the difference in the right and left brake force, assisting the driver in making corrective steering operations. With this, driving stability is ensured while maintaining appropriate brake force.
Figure 2. Concept Image
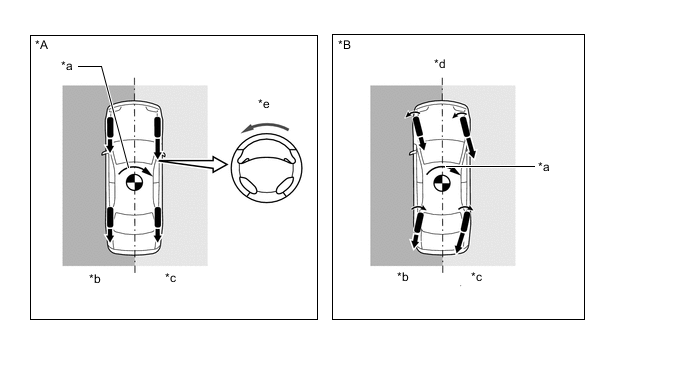
*A Models without Lexus Dynamic Handling System *B Models with Lexus Dynamic Handling System *a Moment Generated due to Left and Right Brake Force Differences *b Low μ Surface *c High μ Surface *d Due to front and rear wheel steering angle control by LDH, steering corrections by the driver become almost unnecessary *e Steering assist control by EPS facilitates the driver's steering maneuver - - 
Brake Force - -
-
-
Acceleration Control on Roads with High and Low Friction Coefficient
-
When accelerating on a split friction road, such as with the right tires on asphalt and the left tires on snow, due to a difference of drive force between the left and right, the vehicle tends to deflect toward the lower friction side. In this state, the vehicle is controlled to steer in a direction that restrains moment generated due to the difference in the right and left drive force, assisting the driver in making corrective steering operations. As a result, ideal drive force control and vehicle stability is ensured.
Figure 3. Concept Image
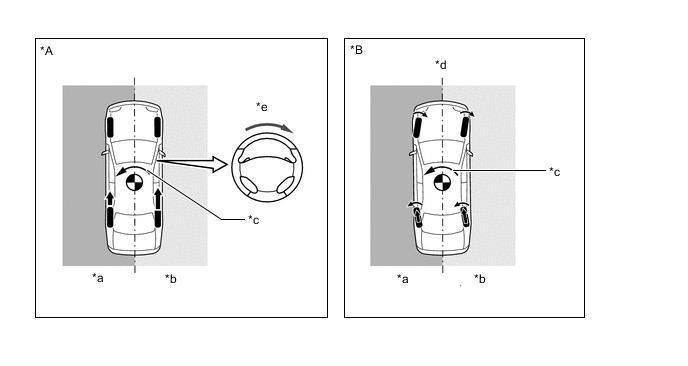
*A Models without Lexus Dynamic Handling System *B Models with Lexus Dynamic Handling System *a Low μ Surface *b High μ Surface *c Moment Generated due to Left and Right Drive Force Difference *d Due to front and rear wheel steering angle control by LDH, steering corrections by the driver become almost unnecessary *e Steering assist control by EPS facilitates the driver's steering maneuver - - Drive Force - -
-
-
Oversteer Control
-
When the skid control ECU determines that there is a large oversteer tendency, it takes countermeasures in accordance with the extent of that tendency. The skid control ECU applies the brakes of the front and rear wheel on the outer circle of the turn, generating an outward stabilization moment to restrain the oversteer tendency.
-
In addition to brake control, steering cooperative control also controls vehicle steering to generate stabilization moments. Compared to vehicle control only performed by brake control, excessive deceleration is restrained, ensuring driving stability.
Figure 4. Concept Image
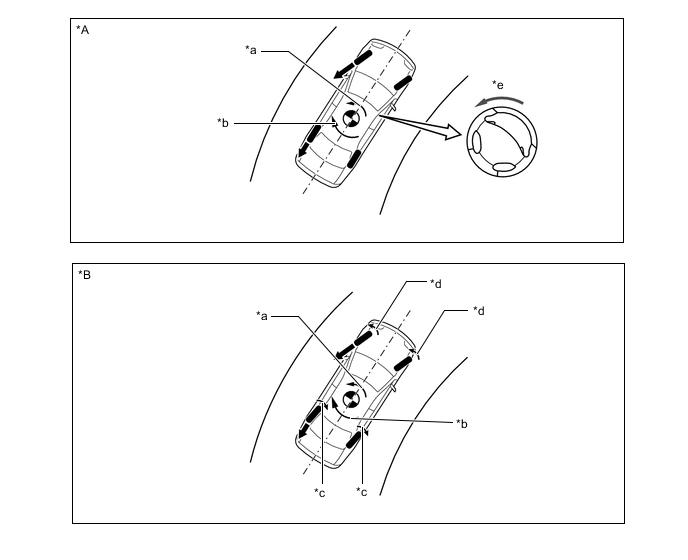
*A Models without Lexus Dynamic Handling System *B Models with Lexus Dynamic Handling System *a Stabilization Moment generated due to brake control *b Moment generated due to oversteer *c Rear wheel steering angle control by DRS *d Front wheel steering angle control by VGRS *e Steering assist control by EPS - - Brake Force - -
-
-
Understeer Control
-
When the skid control ECU determines that there is a large understeer tendency, it takes countermeasures in accordance with the extent of that tendency. The skid control ECU restrains drive force and applies the brakes of the front and rear wheels, generating inward stabilization moment to restrain understeer tendency.
-
Additionally, during an understeer tendency, if the system determines further steering operation is not required to change the vehicle direction, steering cooperative control controls vehicle steering in order to restrain excessive front wheel steering.
Figure 5. Concept Image
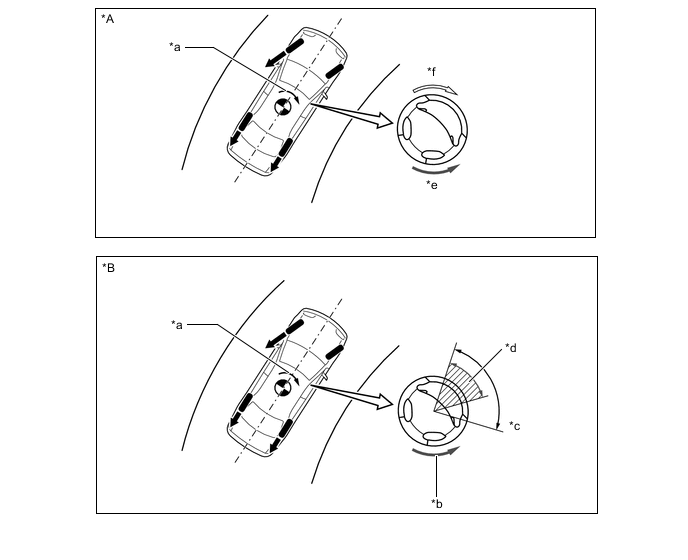
*A Models without Lexus Dynamic Handling System *B Models with Lexus Dynamic Handling System *a Stabilization Moment by brake control *b EPS applies steering torque in a direction that prevents excessive turning of front wheels *c Steered angle by driver operation *d Steering gear ratio is increased by VGRS, reducing the actual front wheel steering angle compared to the steered angle by the driver *e If the driver steers further excessively, the system applies steering torque in a direction that increases the resistance of steering. *f The system applies steering torque in a direction that reduces the resistance of steering to inform the driver of the limit of steering. Brake Force - -
-
-