SFI SYSTEM
-
CONSTRUCTION
-
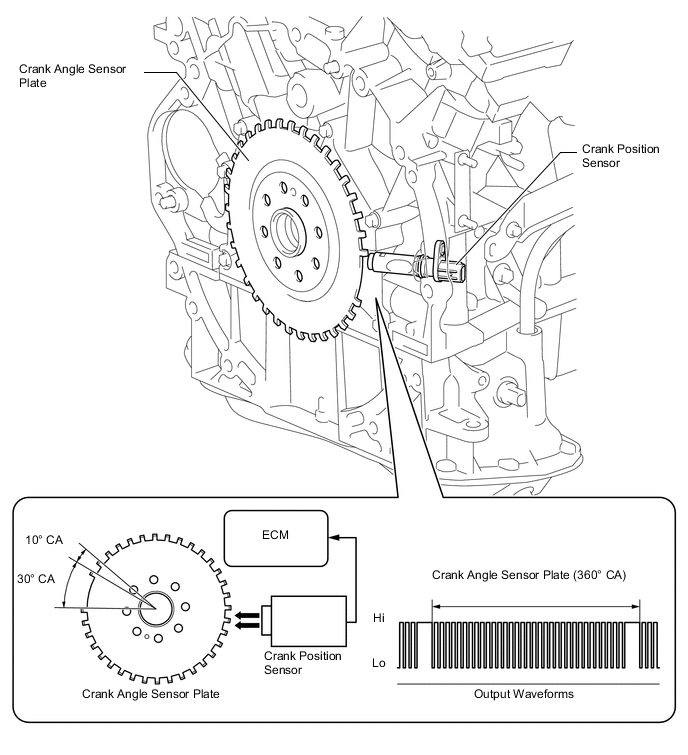
A Magnetic Resistance Element (MRE) type crank position sensor is used to detect the engine speed and crankshaft angle.
-
The crank angle sensor plate (timing rotor) of the crankshaft consists of 34 teeth with 2 teeth missing. The crank position sensor outputs a crankshaft rotation signal every 10°, and the change of the signal due to the missing teeth is used to determine top-dead-center.
-
The crank angle sensor plate for the crank position sensor is installed on the crankshaft. The crank angle sensor plate has 34 teeth, with 2 teeth missing, at 10° intervals. Based on these teeth, the crank position sensor transmits crankshaft position signals (NE signal) consisting of 33 high and low output pulses every 10° per revolution of the crankshaft, and 1 high and low output pulse every 30°. The ECM uses the NE signal for detecting the crankshaft position as well as for detecting the engine speed. It uses the missing teeth signal to determine the top dead center.
-
An MRE type crank position sensor consists of an MRE, a magnet and a sensor. The direction of the magnetic field changes due to the profile (protruding and non-protruding portions) of the crank angle sensor plate, which passes by the sensor. As a result, the resistance of the MRE changes, and the output voltage to the ECM changes to high or low. The ECM detects the crankshaft position based on this output voltage.
-
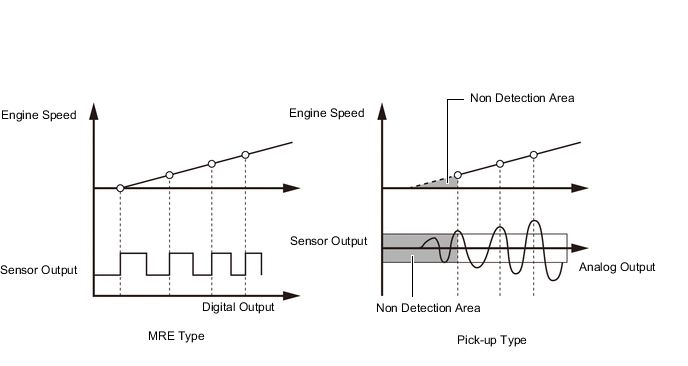
The differences between a MRE type sensor and the pick-up coil type sensor used on the conventional models are as follows:
-
The MRE type sensor outputs a constant level of high and low digital signals regardless of the engine speed. Therefore, the MRE type sensor can detect the positions of the crankshaft at an early stage of cranking.
-
The pick-up coil type sensor outputs analog signals with levels that change with the engine speed.
Figure 1. MRE Type and Pick-up Coil Type Output Waveform Image Comparison
-
-