СИСТЕМА ДИНАМИЧЕСКОГО УПРАВЛЕНИЯ LEXUS
-
НАЗНАЧЕНИЕ ОСНОВНЫХ УСТРОЙСТВ
Устройство Функция ЭБУ переднего рулевого управления
-
Вычисляет требуемый угол поворота передних колес на основании сигналов угла поворота рулевого колеса и скорости автомобиля, и приводит в движение электродвигатель привода рулевого управления в сборе.
-
Вычисляет требуемый угол поворота задних колес на основании сигналов угла поворота рулевого колеса и скорости автомобиля, и передает сигнал управления в ЭБУ заднего рулевого управления.
ЭБУ заднего рулевого управления Управляет электродвигателем тяги заднего рулевого управления в сборе в соответствии с сигналом заданного угла поворота задних колес от ЭБУ переднего рулевого управления. Датчик положения рулевого колеса Определяет направление и угол поворота рулевого колеса. Датчик рысканья Определяет угловую скорость и продольную и боковую составляющие ускорения автомобиля. Привод рулевого управления в сборе Датчик угла поворота Определяет угол поворота электродвигателя. Электродвигатель Поворачивается после получения сигналов управления от ЭБУ переднего рулевого управления, приводя в движение редуктор. Редуктор
-
Посредством волнового передаточного механизма замедляет вращение электродвигателя, устанавливая передаточное число 1:50.
-
Приводится в движение за счет вращения электродвигателя, создавая рабочий угол VGRS между первичным и выходным валами привода рулевого управления в сборе.
Соленоид блокировки Блокирует электродвигатель, прекращая работу привода рулевого управления в сборе, когда в системе обнаруживается неисправность, или выключается зажигание. Тяга заднего рулевого управления в сборе Электродвигатель Вращается после получения сигнала управления от ЭБУ заднего рулевого управления, поворачивая задние колеса. Stroke Sensor Определяет величину хода тяги заднего рулевого управления в сборе. Датчик угла поворота Определяет угол поворота электродвигателя. ЭБУ рулевого управления с усилителем Обменивается данными для координированного управления усилением рулевого управления с ЭБУ переднего рулевого управления. Блок управления рабочими цилиндрами тормозов в сборе ЭБУ системы противоскольжения Передает сигнал скорости автомобиля и сигнал величины координированного рулевого управления в ЭБУ переднего рулевого управления. ECM Передает данные о режиме привода, выбранном с помощью переключателя выбора режима привода, в ЭБУ переднего рулевого управления. Щиток приборов в сборе Мультиинформационный дисплей Отображает предупреждающее сообщение, информируя водителя о неисправности в системе. Главная контрольная лампа аварийного состояния Загорается, когда на мультиинформационном дисплее отображается предупреждающее сообщение. Зуммер Подает звуковой сигнал, уведомляя водителя о неисправности в системе. -
-
УПРАВЛЕНИЕ В СИСТЕМЕ
-
Требуемые характеристики автомобиля в зависимости от скорости автомобиля
-
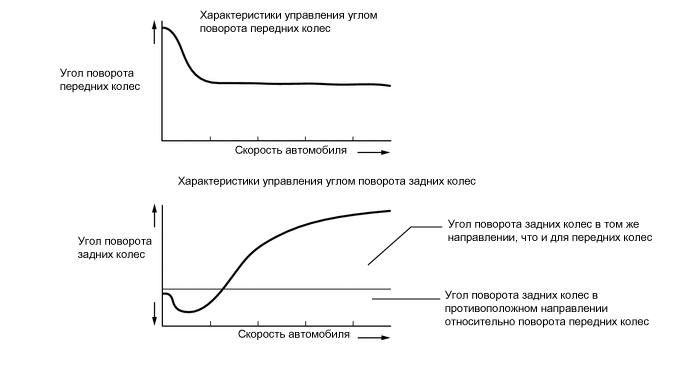
Требуемые характеристики автомобиля в системе LDH вычисляются в соответствии со скоростью автомобиля, что позволяет устанавливать оптимальные углы поворота передних и задних колес в зависимости от угла поворота рулевого колеса.
-
Система LDH регулирует углы поворота передних и задних колес в соответствии с углом поворота рулевого колеса и скоростью автомобиля, благодаря чему достигаются требуемые характеристики автомобиля.
Figure 1. Требуемая характеристика автомобиля
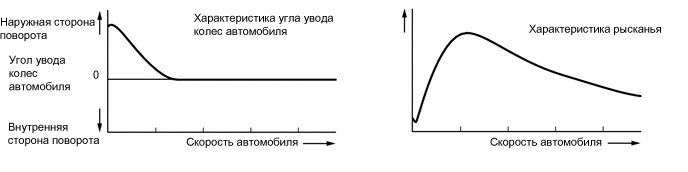
Figure 2. Изображение системы управления
-
Управление в диапазоне средних скоростей (улучшение реакции рулевого управления)
-
В диапазоне средних скоростей устанавливается требуемые характеристики автомобиля, которые обеспечивают превосходную маневренность. При этом в местах, где требуется выполнять большой объем операций маневрирования, например, в городе или на горной дороге, достигается ощущение легкости управления, которое отвечает интересам водителя.
-
-
Управление в диапазоне высоких скоростей (повышение комфорта и курсовой устойчивости)
-
Во время выполнения поворота при высокой скорости на автомобиле с традиционным управлением передними колесами задние колеса проявляют незначительную тенденцию к смещению наружу дуги поворота. Соответственно, продольная ось автомобиля отклоняется внутрь дуги поворота от касательной к окружности поворота. Чем выше скорость автомобиля, тем больше проявляется этот эффект.
-
В диапазоне высоких скоростей требуемый угол бокового увода автомобиля устанавливается примерно равным 0. Это позволяет задним колесам реагировать на изменения угла поворота рулевого колеса с почти нулевой задержкой, благодаря чему достигаются высокая курсовая устойчивость и реакция, отвечающая намерениям водителя.
-
-
-
Управление в режиме SPORT (для моделей с системой AVS)
-
Когда с помощью переключателя выбора режима привода выбирается режим SPORT S+, ЭБУ переднего рулевого управления изменяет характеристику передаточного числа рулевого управления для обеспечения спортивного стиля вождения, повышая быстродействие рулевого управления автомобиля по сравнению с режимом NORMAL.
-
-
Согласованное управление с EPS
-
После получения сигналов от ЭБУ системы противоскольжения (блока управления рабочими цилиндрами тормозов в сборе) ЭБУ переднего рулевого управления регулирует углы поворота передних и задних колес.
-
Управление во время торможения на поверхности дороги с изменяющимся поверхностным трением
-
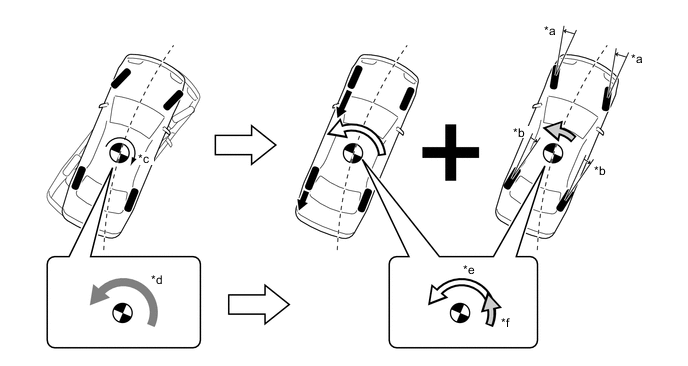
При торможении на дороге с неоднородным поверхностным трением автомобиль стремится отклониться в сторону высокого коэффициента трения из-за большего тормозного усилия. В таком состоянии система поворачивает передние колеса в сторону низкого коэффициента трения, устраняя момент, создаваемый в направлении поворота автомобиля.
-
За счет поворота задних колес в направлении, протоволожном движению передних колес, регулируется боковое смещение автомобиля.
Figure 3. Изображение системы управления
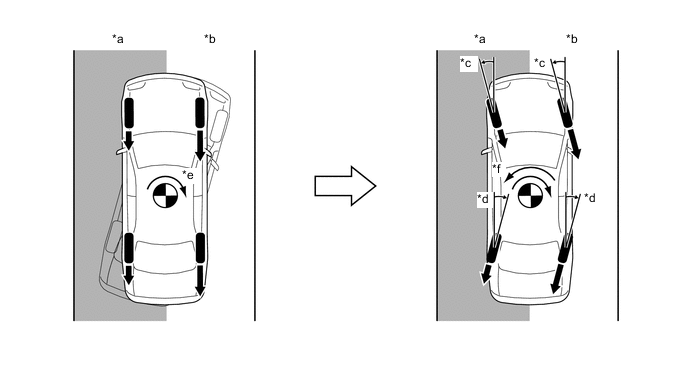
*a Поверхность дороги с низким коэффициентом трения *b Поверхность дороги с высоким коэффициент трения *c Управление поворотом передних колес *d Управление поворотом задних колес *e Момент, создаваемый из-за разности тормозных усилий левого и правого колес *f Стабилизирующий момент, создаваемый за счет рулевого управления 
Тормозное усилие - -
-
-
Управление во время разгона на поверхности дороги с изменяющимся поверхностным трением
-
При разгоне на дороге с неоднородным поверхностным трением автомобиль стремится отклониться в сторону низкого коэффициента трения из-за меньшего разгоняющего усилия. В таком состоянии система поворачивает передние колеса в сторону высокого коэффициента трения, устраняя момент, создаваемый в направлении поворота автомобиля.
-
За счет поворота задних колес в направлении, протоволожном движению передних колес, регулируется боковое смещение автомобиля.
Tech Tips
-
На моделях без системы LDH система VDIM управляет автомобилем, поддерживая его прямолинейное движение.
-
На моделях с системой LDH курсовая устойчивость автомобиля выше, что позволяет сохранять управление во время интенсивного торможения или разгона.
Figure 4. Изображение системы управления
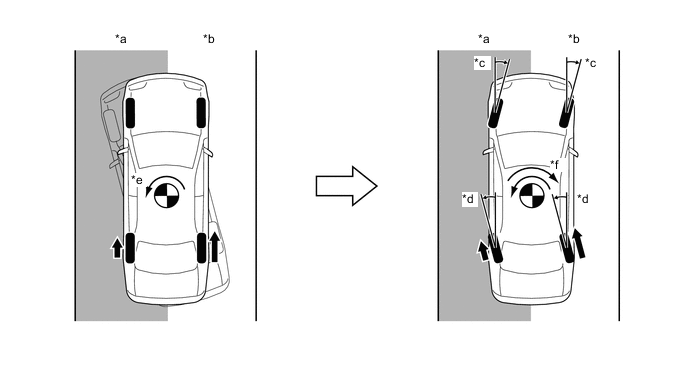
*a Поверхность дороги с низким коэффициентом трения *b Поверхность дороги с высоким коэффициент трения *c Управление поворотом передних колес *d Управление поворотом задних колес *e Момент, создаваемый из-за разности тяговых усилий левого и правого колес *f Стабилизирующий момент, создаваемый за счет рулевого управления Тяговое усилие - - -
-
-
Управление при избыточной поворачиваемости
-
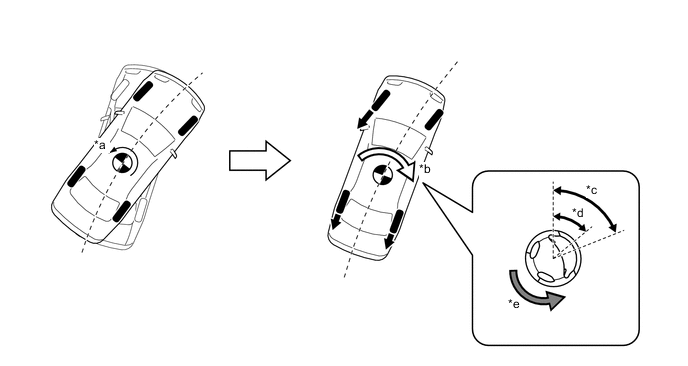
Когда регистрируется тенденция к избыточной поворачиваемости (занос задних колес), движение автомобиля во время маневра стабилизируется за счет координирования обычного регулирования тормозного и тягового усилий, и управления поворотом передних и задних колес.
-
Стабилизирующий момент, создаваемый рулевым управлением вдобавок к обычным тормозным и тяговым усилиям, повышает курсовую устойчивость, не вызывая ощущения чрезмерного замедления.
Figure 5. Изображение системы управления
*a Управление поворотом передних колес *b Управление поворотом задних колес *c Тенденция к избыточной поворачиваемости (занос задних колес) *d Стабилизирующий момент, необходимый для уменьшения избыточной поворачиваемости (заноса задних колес) *e Стабилизирующий момент за счет регулирования тормозного и тягового усилий *f Стабилизирующий момент за счет рулевого управления Тормозное усилие - -
-
-
Управление при недостаточной поворачиваемости
-
Когда регистрируется тенденция к недостаточной поворачиваемости (занос передних колес), за счет регулирования тормозного и тягового усилий создается момент в направлении поворота автомобиля, чтобы ослабить недостаточную поворачиваемость.
-
Благодаря изменению передаточного числа рулевого управления в системе VGRS уменьшается чрезмерный поворот передних колес. Усиление крутящего момента рулевого управления обеспечивается в направлении, противоположном направлению действия рулевого управления, побуждая водителя корректировать направление движения.
Figure 6. Изображение системы управления
*a Тенденция к недостаточной поворачиваемости (занос передних колес) *b Стабилизирующий момент за счет регулирования тормозного усилия и усилия, создаваемого водителем *c Угол поворота, заданный водителем *d VGRS изменяет передаточное число рулевого управления, чтобы сделать фактический угол поворота передних колес меньше, чем угол поворота, заданный водителем. *e EPS усиливает крутящий момент рулевого управления в направлении, противоположном направлению поворота передних колес. - - Тормозное усилие - -
-
-
-
-
Функция работы в аварийном режиме
-
Когда в системе обнаруживается неисправность, система переходит в аварийный режим работы. Система уведомляет водителя о неисправности, включая главную контрольную лампу аварийного состояния, зуммер и отображая предупреждающее сообщение на мультиинформационном дисплее щитка приборов в зависимости от неисправности системы.
-
Когда система переходит в аварийный режим работы, подача питания в механизм блокировки прекращается, вследствие чего этот механизм вводится в зацепление внутри привода рулевого управления в сборе, непосредственно соединяя корпус с выходным валом, что обеспечивает надлежащую работу рулевого управления Кроме того, отключается или постепенно прекращается подача питания в электродвигатель тяги заднего рулевого управления в сборе, что предотвращает осуществление управления поворотом задних колес.
-
-
ДИАГНОСТИКА
-
Когда обнаруживается неисправность, система сохраняет диагностические коды неисправностей (DTC). Коды DTC можно считать с помощью Global TechStream (GTS). Более подробную информацию см. в Руководстве по ремонту.
-