СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ
-
УПРАВЛЕНИЕ В СИСТЕМЕ
-
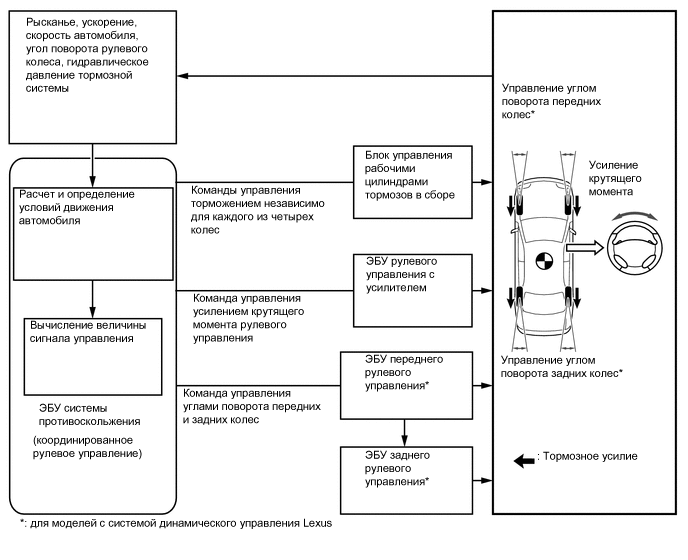
Координированное рулевое управление обеспечивает согласованное управление тормозами и усиление крутящего момента рулевого управления под управлением системы рулевого управления с электроусилителем (EPS). Благодаря объединению этих функций гарантируются превосходная курсовая устойчивость и маневренность автомобиля.
-
На моделях с системой динамического управления (LDH) Lexus благодаря координированному управлению с регулированием угла поворота передних колес, осуществляемым системой рулевого управления с переменным передаточным числом (VGRS), и регулированием угла поворота задних колес, осуществляемым системой динамического заднего рулевого управления (DRS), обеспечивается более высокая курсовая устойчивость.
-
Когда автомобиль теряет устойчивость из-за пробуксовки колес, эта функция начинает управлять тормозами, подводя тормозное давление к каждому колесу, при этом одновременно осуществляются усиление крутящего момента рулевого управления, регулирование угла поворота передних колес и регулирование угла поворота задних колес, чтобы помочь водителю выполнить маневр поворота.
Figure 1. Общая схема работы координированного рулевого управления
-
Регулирование тормозного усилия на дорогах с высоким и низким коэффициентом трения
-
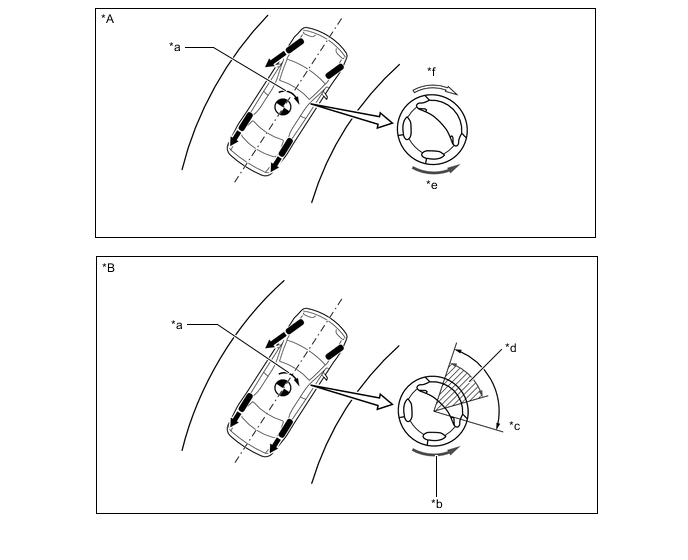
При резком торможении на дороге с неоднородным поверхностным трением, например, с правыми шинами на асфальте и левыми шинами на снегу, из-за различия тормозных усилий слева и справа автомобиль стремится отклониться в сторону большего трения. В этом состоянии управление автомобилем осуществляется таким образом, чтобы он поворачивался в направлении снижения момента, создаваемого вследствие различия тормозных усилий слева и справа, что помогает водителю корректировать направление движения. Благодаря этому обеспечивается курсовая устойчивость и поддерживается надлежащее тормозное усилие.
Figure 2. Общая схема работы
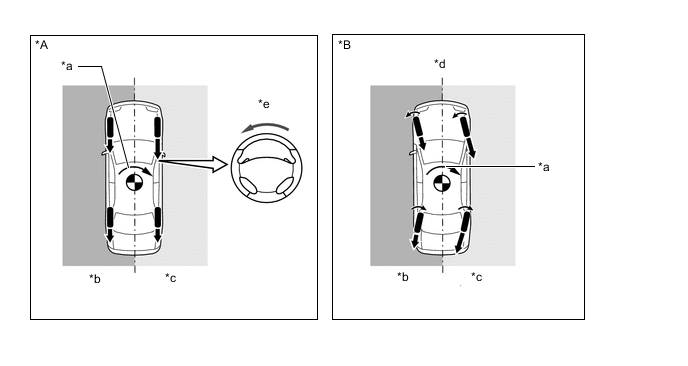
*A для моделей без системы динамического управления Lexus *B для моделей с системой динамического управления Lexus *a Момент, создаваемый вследствие различия тормозных усилий слева и справа *b Поверхность с низким μ *c Поверхность с высоким μ *d Благодаря регулированию углов поворота передних и задних колес системой LDH корректировка направления движения водителем становится почти ненужной. *e Усиление рулевого управления, осуществляемое EPS, облегчает выполнение маневра поворота водителем. - - 
Тормозное усилие - -
-
-
Управление ускорением на дорогах с высоким и низким коэффициентом трения
-
При разгоне на дороге с неоднородным поверхностным трением, например, с правыми шинами на асфальте и левыми шинами на снегу, из-за различия тяговых усилий слева и справа автомобиль стремится отклониться в сторону меньшего трения. В этом состоянии управление автомобилем осуществляется таким образом, чтобы он поворачивался в направлении снижения момента, создаваемого вследствие различия тяговых усилий слева и справа, что помогает водителю корректировать направление движения. В результате обеспечиваются идеальное регулирование тягового усилия и курсовая устойчивость автомобиля.
Figure 3. Общая схема работы
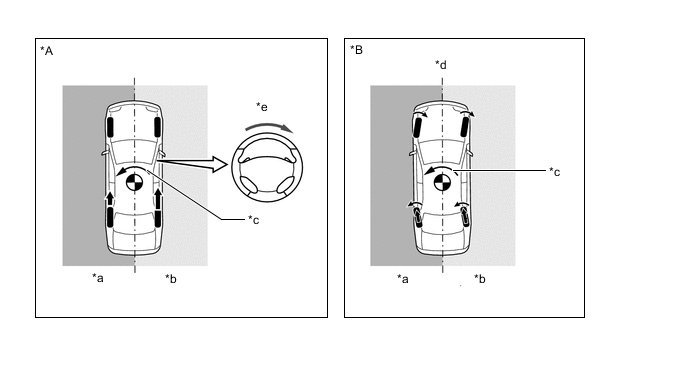
*A для моделей без системы динамического управления Lexus *B для моделей с системой динамического управления Lexus *a Поверхность с низким μ *b Поверхность с высоким μ *c Момент, создаваемый вследствие различия тяговых усилий слева и справа *d Благодаря регулированию углов поворота передних и задних колес системой LDH корректировка направления движения водителем становится почти ненужной. *e Усиление рулевого управления, осуществляемое EPS, облегчает выполнение маневра поворота водителем. - - Тяговое усилие - -
-
-
Управление при избыточной поворачиваемости
-
Когда ЭБУ системы противоскольжения распознает существенную тенденцию к избыточной поворачиваемости, он предпринимает также нейтрализующие действия в зависимости от вероятности заноса. ЭБУ системы противоскольжения включает тормоза передних и задних колес внешнего радиуса поворота, создавая направленный наружу стабилизирующий момент, чтобы ослабить тенденцию к избыточной поворачиваемости.
-
Наряду с управлением тормозами координированное рулевое управление также регулирует направление движения автомобиля, создавая стабилизирующие моменты. Благодаря этому предотвращается чрезмерное замедление, характерное для управления автомобилем только за счет управления тормозами, что обеспечивает курсовую устойчивость.
Figure 4. Общая схема работы
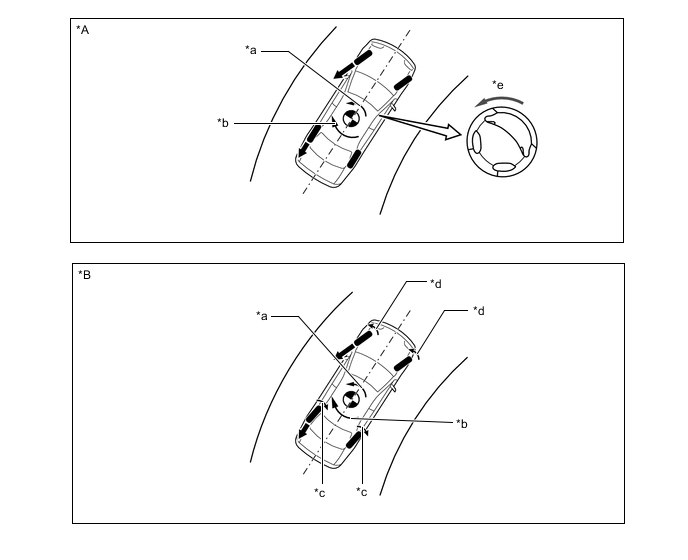
*A для моделей без системы динамического управления Lexus *B для моделей с системой динамического управления Lexus *a Стабилизирующий момент, создаваемый вследствие управления тормозами *b Момент, создаваемый из-за избыточной поворачиваемости *c Регулирование угла поворота задних колес системой DRS *d Регулирование угла поворота передних колес системой VGRS *e Управление усилением рулевого управления системой EPS - - Тормозное усилие - -
-
-
Управление при недостаточной поворачиваемости
-
Когда ЭБУ системы противоскольжения распознает существенную тенденцию к недостаточной поворачиваемости, он предпринимает нейтрализующие действия в зависимости от вероятности заноса. ЭБУ системы противоскольжения ограничивает тяговое усилие и включает тормоза передних и задних колес, создавая направленный внутрь стабилизирующий момент, чтобы ослабить тенденцию к недостаточной поворачиваемости.
-
Кроме того, если при тенденции к недостаточной поворачиваемости система определяет, что для изменения направления движения не требуется дополнительно приводить в действие рулевое управление, координированное рулевое управление регулирует направление движения автомобиля так, чтобы воспрепятствовать избыточному повороту передних колес.
Figure 5. Общая схема работы
*A для моделей без системы динамического управления Lexus *B для моделей с системой динамического управления Lexus *a Стабилизирующий момент, создаваемый за счет управления тормозами *b EPS прикладывает крутящий момент рулевого управления в направлении, которое позволяет воспрепятствовать избыточному повороту передних колес *c Угол поворота, заданный водителем *d VGRS увеличивает передаточное число рулевого управления, уменьшая угол поворота передних колес по сравнению с углом поворота, заданным водителем *e Если водитель продолжает избыточно поворачивать автомобиль, система прикладывает крутящий момент рулевого управления в направлении, которое обеспечивает увеличение усилия, требуемого для поворота рулевого колеса. *f Система прикладывает крутящий момент рулевого управления в направлении, которое обеспечивает увеличение усилия, требуемого для поворота рулевого колеса, чтобы уведомить водителя об ограничении рулевого управления. Тормозное усилие - -
-
-