СИСТЕМА SFI
-
КОНСТРУКЦИЯ
-
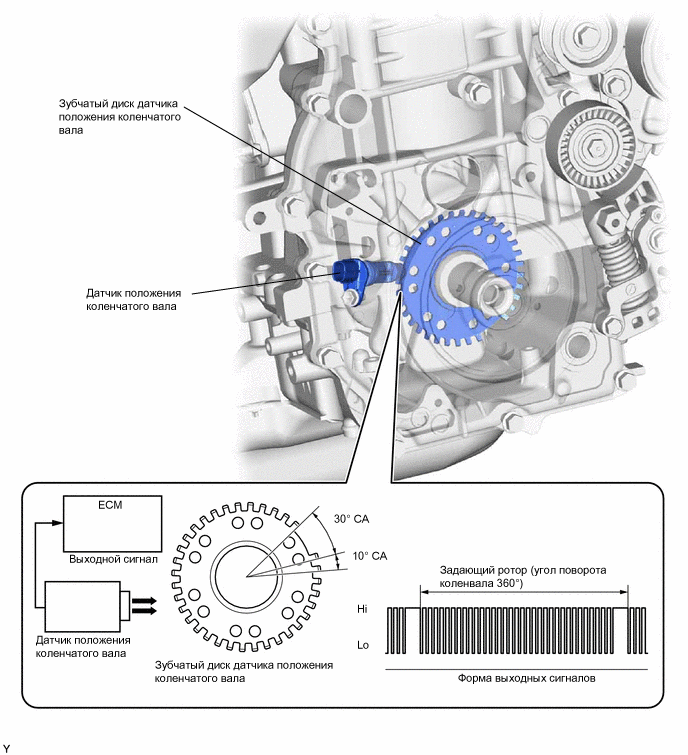
Применяется датчик положения коленчатого вала с магнитным резистивным элементом (MRE), по сигналу которого определяются частота вращения и угол поворота коленчатого вала двигателя.
-
Зубчатый диск датчика положения коленчатого вала (задающий ротор) имеет 34 зубца, причем 2 зубца отсутствуют. Датчик положения коленчатого вала через каждые 10° передает сигналы вращения коленчатого вала, а изменения сигнала, обусловленные отсутствием зубцов, используются для определения верхней мертвой точки.
-
Датчик положения коленчатого вала типа MRE состоит из магнитного резистивного элемента, магнита и чувствительного элемента. Из-за особенностей профиля (выступающих и невыступающих частей) зубчатого диска датчика положения коленчатого вала, вращающегося рядом с чувствительным элементом, изменяется направление вектора напряженности магнитного поля. В результате изменяется сопротивление магнитного резистивного элемента, и происходит переключение уровня выходного напряжения, подаваемого на ECM. На основе этого напряжения ECM определяет положение коленчатого вала.
-
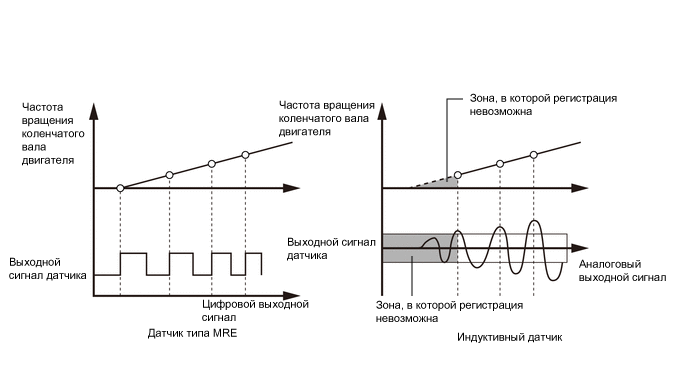
Датчики типа MRE имеют следующие отличия от индуктивных датчиков, применяемых в обычных моделях:
-
Высокий и низкий уровни импульсных сигналов датчиков типа MRE не зависят от частоты вращения коленчатого вала двигателя. Таким образом, датчики типа MRE способны определять положения коленчатого вала уже на начальной стадии прокручивания коленчатого вала.
-
Индуктивные датчики выдают аналоговые сигналы, уровни которых изменяются в зависимости от частоты вращения коленчатого вала двигателя.
Figure 1. Сравнение выходных сигналов датчика типа MRE и индуктивного датчика
-
-