LIGHTING SYSTEM
-
FUNCTION OF MAIN COMPONENTS
Component Function Forward Recognition Camera
-
Determines when to turn the high beams on and off after identifying the lights of oncoming vehicles, preceding vehicles and other lights from the picture information of its camera sensor. Then, the sensor sends high beam request signals to the main body ECU (multiplex network body ECU).
-
Transmits an operation signal to the camera heater.
Camera Heater (Forward Recognition Hood with Heater Sub-assembly) The camera heater is heated according to signals from the forward recognition camera. Main Body ECU (Multiplex Network Body ECU) Receives each sensor and switch condition and illuminates or turns off the lights. Hybrid Vehicle Control ECU Outputs a signal to indicate that the shift lever is in R. Based on this signal, the forward recognition camera determines the direction of vehicle movement. Skid Control ECU Outputs information about the average speed of the 4 wheels. This information is used by the forward recognition camera to control switching between the high and low beams of the automatic high beam system. Combination Meter Assembly
-
Illuminates the automatic high beam indicator light to inform the driver when the automatic high beam system is activated.
-
Illuminates the high beam indicator light to inform the driver when the high beams are on.
Airbag ECU Assembly Outputs yaw rate information. Automatic Light Control Sensor Detects the ambient light level and transmits a signal to the main body ECU (multiplex network body ECU). Automatic High Beam Switch Outputs the switch on signal to the main body ECU (multiplex network body ECU). Headlight Dimmer Switch Assembly Transmits the light control switch and dimmer switch signal to the main body ECU (multiplex network body ECU). -
-
SYSTEM CONTROL
Function Operation Condition Active When all of the following conditions are met, the automatic high beam system is activated and the automatic high beam indicator light turns on:
-
The power switch is on (IG).
-
The light control switch (headlight dimmer switch assembly) is in the AUTO or head position and the low beam headlights are on.
-
The dimmer switch (headlight dimmer switch assembly) is in the high beam position.
-
The automatic high beam switch is on.
-
The shift lever is in any position other than R.
High Beams On When all of the following conditions are met, the automatic high beam system turns on the high beams after a short delay:
-
Vehicle speed is more than approximately 40 km/h (25 mph)*1.
-
Vehicle speed is more than approximately 30 km/h (19 mph)*2.
-
The area in front of the vehicle is dark.
-
No oncoming vehicles are present with the headlights on.
-
No preceding vehicles are present with the taillights on.
-
Few streetlights are present along the street ahead.
High Beams Off When any of the following conditions is met, the automatic high beam system turns off the high beams after a short delay:
-
Vehicle speed is less than approximately 30 km/h (19 mph)*1.
-
Vehicle speed is less than approximately 25 km/h (16 mph)*2.
-
The area in front of the vehicle is not dark.
-
An oncoming vehicle with headlights on is detected.
-
A preceding vehicle with taillights on is detected.
-
Several streetlights are present along the street ahead.
-
*1: Models for Europe
-
*2: Except models for Europe
-
-
FUNCTION
-
When passing an oncoming vehicle:
-
The automatic high beam system turns off the high beams before an oncoming vehicle comes within approximately 800 m (2625 ft.).
-
When an oncoming vehicle passes out of camera sensor range, the automatic high beam system turns the high beams on after a short delay.
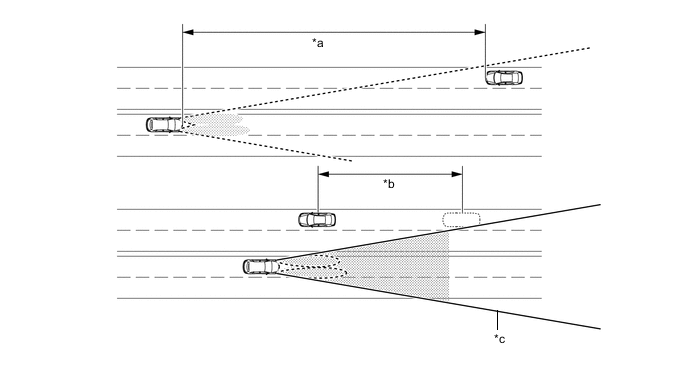
*a 800 m (2625 ft.) *b Delay *c Camera Sensor Angle - - Tech Tips
-
The detection distance varies depending on detected objects.
-
The timing of turning on and off the high beams varies depending on the intensity of oncoming (and preceding) vehicle lights.
-
-
-
When passing a preceding vehicle:
-
When approaching a preceding vehicle, the automatic high beam system turns off the high beams approximately 600 m (1969 ft.) before reaching it.
-
When a preceding vehicle passes out of camera sensor range, the automatic high beam system turns the high beams on after a short delay.
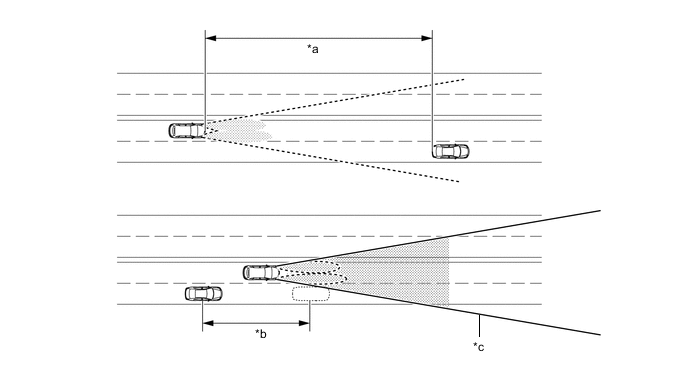
*a 600 m (1969 ft.) *b Delay *c Camera Sensor Angle - - Tech Tips
The timing of turning on and off the high beams varies depending on the intensity of the preceding vehicle lights.
-
-
-
DIAGNOSIS
-
When the main body ECU (multiplex network body ECU) detects a malfunction in the automatic high beam control system, Diagnostic Trouble Codes (DTCs) are stored in memory.
-
The DTCs can be read using the Global TechStream (GTS). For details, refer to the Repair Manual.
-