СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ
-
УПРАВЛЕНИЕ В СИСТЕМЕ
-
В системе используются активные датчики частоты вращения. Датчик частоты вращения содержит датчик Холла.
-
В каждом из передних датчиков частоты вращения используется зубчатый ротор, установленный на приводном валу ведущего колеса.
-
В задних датчиках частоты вращения используется ротор магнитного типа с полюсами N и S, расположенными на его окружности. Ротор заднего датчика частоты вращения встроен во внутреннее кольцо подшипника ступицы.
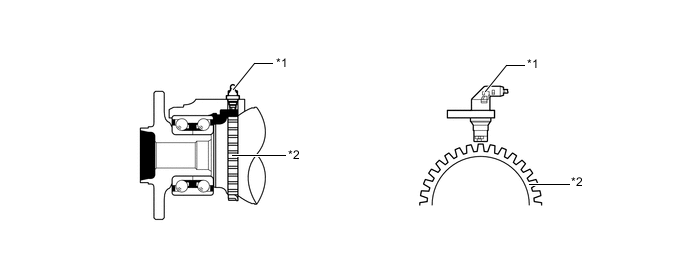
*1 Передний датчик частоты вращения *2 Ротор датчика Figure 1. Для моделей с приводом на одну ось
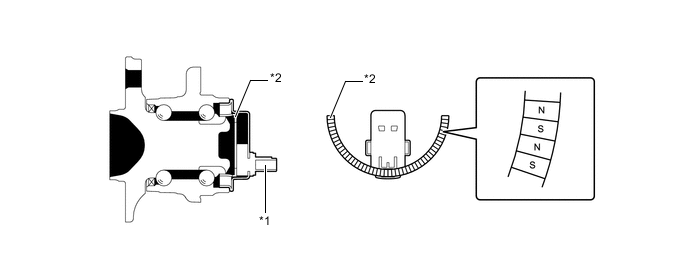
*1 Задний датчик частоты вращения *2 Ротор датчика Figure 2. Для моделей с постоянным полным приводом
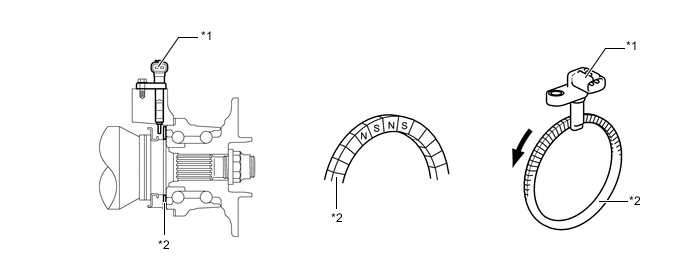
*1 Задний датчик частоты вращения *2 Ротор датчика -
В активном датчике частоты вращения используется микросхема, регистрирующая изменения магнитного поля в результате вращения ротора датчика. При этом датчик передает данные измерений в ЭБУ системы противоскольжения в виде цифровых импульсов (сигнал скорости автомобиля).
-
Скорость автомобиля определяется по частоте выходных импульсов. Поскольку активный датчик формирует цифровые импульсы, он может определять скорости автомобиля, близкие к 0 км/час.
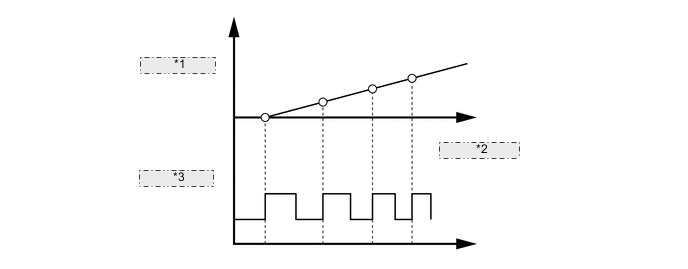
*1 Скорость автомобиля *2 Цифровой выходной сигнал *3 Выходной сигнал датчика
-