BRAKE CONTROL SYSTEM
-
SYSTEM CONTROL
-
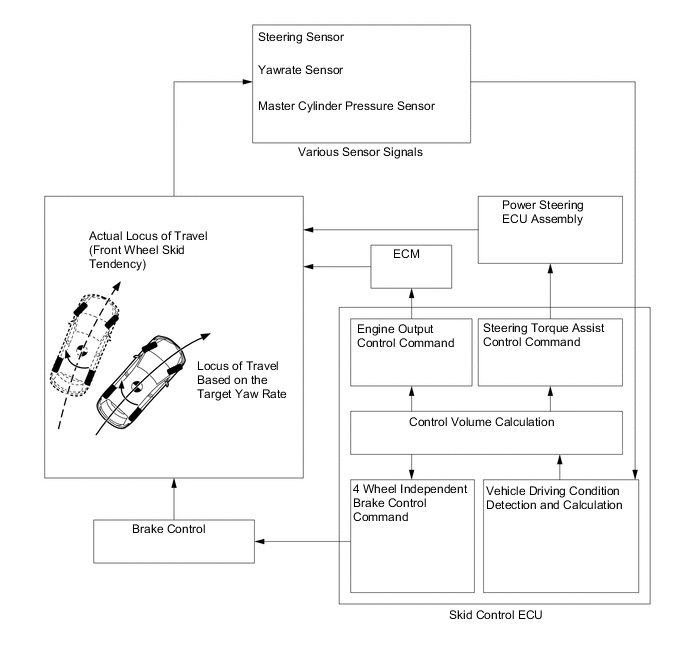
Steering cooperative control performs coordinated control using both VSC and EPS. By integrating these active safety functions, excellent driving stability and maneuverability are secured.
-
If the vehicle loses stability due to wheel slippage, this function performs brake control by applying brake pressure to each individual wheel while at the same time, the EPS provides steering torque assist control to facilitate the driver's steering maneuver.
-
When braking on a split friction road, the vehicle tends to deflect toward the higher friction side due to the difference between the brake force on the left and right sides. In this state, the power steering ECU receives command signals from the skid control ECU. Based on these signals, the power steering ECU operates the EPS motor to reduce the effect of this brake force difference on either side, assisting the driver in making corrective steering operations.
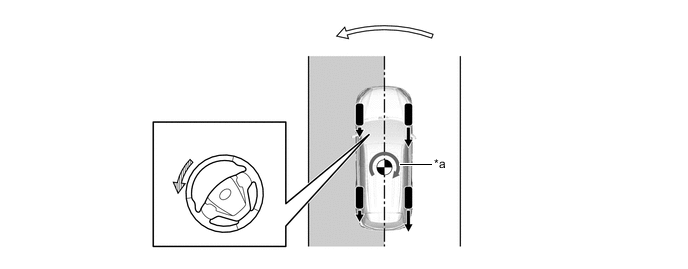
*a Spin Moment - - 
Braking Force 
Anti Spin Moment 
Steering Torque Assist - - 
Slippery Surface - - -
When accelerating on a split friction road, the vehicle tends to deflect toward the lower friction side due to the drive force difference between the left and right sides. In this state, the skid control ECU performs brake control of the drive wheel on the low friction side (TRC function) and transmits command signals to the power steering ECU. Based on these signals, the power steering ECU operates the EPS motor to reduce the effect of this drive force difference on either side, assisting the driver in making corrective steering operations. As a result, ideal drive force control and vehicle stability is ensured.
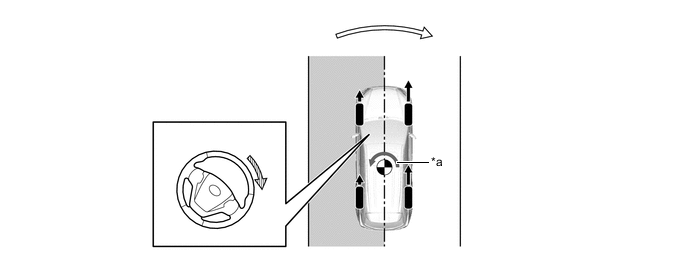
*a Spin Moment - - Driving Force Anti Spin Moment Steering Torque Assist - - Slippery Surface - - -
When understeer (front wheel skid) is detected, engine output is limited and brake control is performed based on the amount of understeer tendency. Accordingly, a moment of force is generated in the vehicle turning direction to limit the understeer tendency.
-
Steering torque assist is also provided to warn the driver of understeer.
-
If the driver turns the steering wheel excessively, steering torque assist is provided to prevent excessive steering input.
-
When oversteer (rear wheel skid) is detected, brake force is applied to mainly the outer wheels based on the amount of oversteer tendency. Accordingly, an anti-spin moment is generated to limit the oversteer tendency.
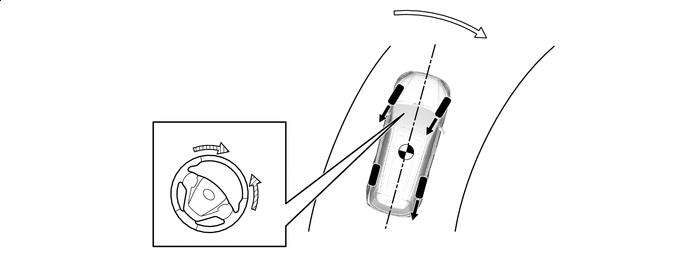
Braking Force Moment of force to restrict front wheel skid Steering Torque Assist (to prevent excessive steering input) 
Steering Torque Assist (to warn driver of understeer) -
In this state, the power steering ECU receives command signals from the skid control ECU. Based on these signals, the power steering ECU operates the EPS motor to compensate for the oversteer tendency, assisting the driver in making corrective steering operations.
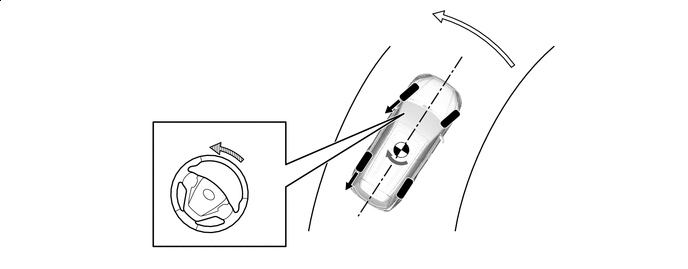
Braking Force Anti Spin Moment Steering Torque Assist - -
-