BRAKE CONTROL SYSTEM
-
SYSTEM CONTROL
-
If the driver presses the accelerator pedal aggressively when starting off or accelerating on a slippery surface, the drive wheel could slip due to the excessive amount of torque that is generated. The adjustment of the motive force and the control of the hydraulic brakes of the drive wheels accomplished by hybrid system allow the TRC function to help minimize the slippage of the drive wheels, and generate the drive force that is appropriate for the road surface conditions.
-
For example, a comparison may be made between two vehicles, one with the TRC function and the other without. If the driver of each vehicle operates the accelerator pedal in a rough manner while driving over a surface with different surface friction characteristics, the drive wheel on the slippery surface could slip as illustrated. As a result, the vehicle could become unstable. However, when the vehicle is equipped with the TRC function, the skid control ECU instantly determines the state of the vehicle and operates the brake actuator in order to apply the brake of the slipping drive wheel. Simultaneously, the skid control ECU effects cooperative control with the power management control ECU, in order to adjust the motive force. Thus, this function can constantly maintain a stable vehicle posture.
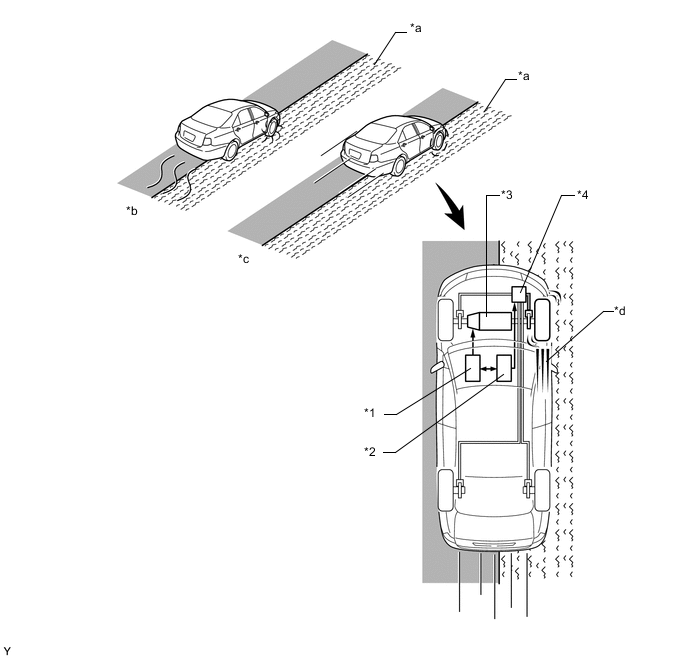
*1 Power Management Control ECU *2 Skid Control ECU *3 Engine and MG2
-
Motive Force Regulation
*4 Brake Actuator *a Slippery Surface *b Without TRC *c With TRC *d Brake the slipping drive wheel -
-