СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ОБ УХОДЕ С ПОЛОСЫ
-
ФУНКЦИИ
-
Датчик предаварийной безопасности при движении в городе получает изображение дороги на расстоянии до 50 м (164 фута) перед датчиком предаварийной безопасности при движении в городе.
-
Датчик предаварийной безопасности при движении в городе определяет разделительные линии и рассчитывает радиус закругления осевой линии полосы, разность расстояний от центра автомобиля до левой и правой разделительных полос, а также угловое расхождение между направлением движения и разделительными линиями слева/справа.
-
Угол датчика предаварийной безопасности при движении в городе необходимо отрегулировать после выполнения любой из следующих операций: Более подробную информацию см. в Руководстве по ремонту.
-
Датчик предаварийной безопасности при движении в городе снят и установлен заново или заменен.
-
Регулировка или замена деталей, связанных с шинами или подвеской.
-
К датчику предаварийной безопасности при движении в городе прикладывалось чрезмерное усилие.
-
-
Датчик предаварийной безопасности при движении в городе определяет расчетное положение, в котором окажутся передние колеса, по собранной информации, скорости автомобиля и текущему положению передних колес. Когда датчик предаварийной безопасности при движении в городе определяет, что переднее колесо может пересечь разделительную линию, этот датчик активирует систему предупреждения об уходе с полосы, отображает предупреждение на мультиинформационном дисплее и включает зуммер.
-
Система предупреждения об уходе с полосы не срабатывает, когда автомобиль приближается к разделительной линии под малым углом, но не пересекает ее.
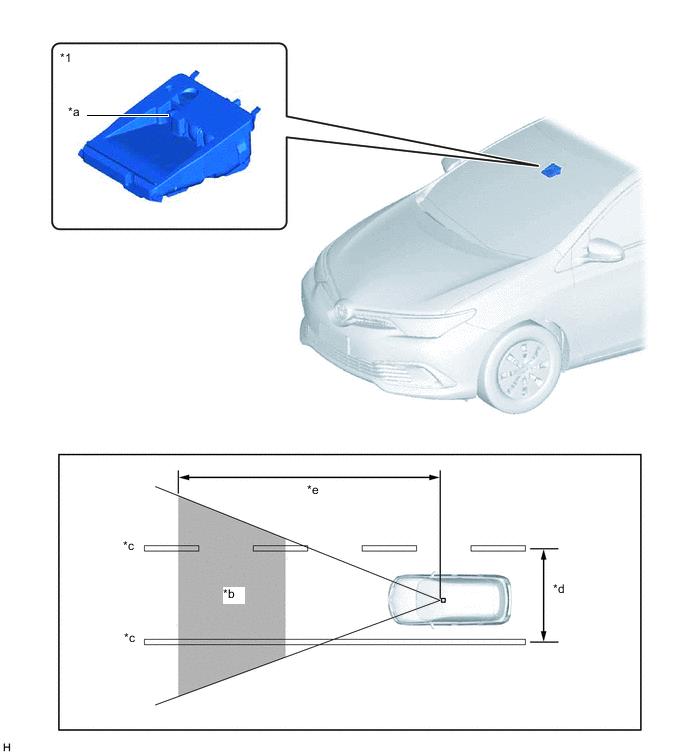
*1 Датчик предаварийной безопасности при движении в городе - - *a Датчик монокулярной камеры *b Зона обработки изображения *c Разделительная линия *d Приблизительно 3,0 м (9,8 фута) или более *e Приблизительно 50 м (164 фута) - - 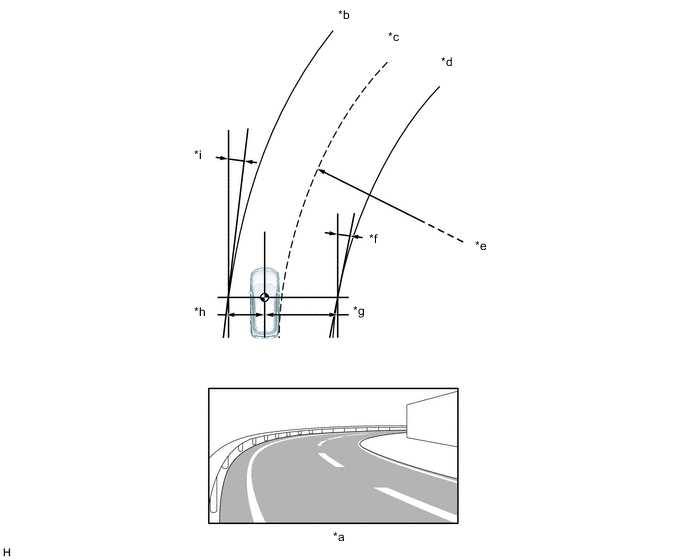
*a Изображение, получаемое датчиком предаварийной безопасности при движении в городе *b Левая разделительная линия *c Центр полосы движения *d Правая разделительная линия *e Радиус полосы (если обнаружена только левая или только правая разделительная линия, вычисляется радиус обнаруженной разделительной линии). *f Угол между направлением движения автомобиля и правой разделительной полосой. *g Расстояние от центра полосы до правой разделительной линии. *h Расстояние от центра полосы до левой разделительной линии. *i Угол между направлением движения автомобиля и левой разделительной линией. - -
-