MULTIPLEX COMMUNICATION SYSTEM
-
OUTLINE
-
The multiplex communication system uses the following 3 communication protocols:
-
The Controller Area Network (CAN) is used for communication between the engine, chassis, and body electrical system.
-
The Local Interconnect Network (LIN) is used for communication within the body electrical system.
-
The AVC-LAN is used for communication only between the Audio Visual (AV) system components.
-
-
The CAN has 2 types with different communication speeds: HS-CAN (high speed) and MS-CAN (medium speed).
-
The gateway function of the main body ECU and power management control ECU convert signals exchanged between the CAN and LIN.
-
Only a certain number of ECUs can be connected to a single bus network line. When connecting more than the maximum number of ECUs, the bus network line must be divided into two or more lines. The network gateway ECU contains a gateway function to divide bus network lines.
-
-
MAIN FEATURES
-
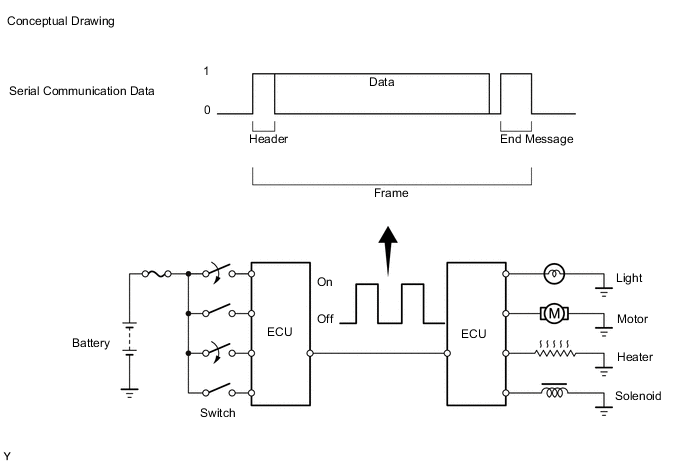
Multiplex communication uses serial communication data that consists of bits and frames in order to exchange information between various ECUs. This allows a reduction in the amount in wiring used in the vehicle.
-
A bit is the basic unit of communication used to represent the information. A bit is represented by binary values of "0" or "1".
-
A frame is a body of data transmitted together. A frame contains a header that indicates the beginning, and an end message that indicates the end.
-
-
Differences between CAN, LIN and AVC-LAN
-
The protocols, which are the rules for establishing data communication, differ between CAN, LIN and AVC-LAN. If the ECUs in the networks use various data frame works using different communication speeds, communication wires or signals, they will be unable to understand each other.
-
Compared to LIN and AVC-LAN, CAN features high-speed data transmission. Therefore, CAN is able to transmit larger amounts of data faster than other protocols. This feature makes it possible to transmit data accurately for the powertrain and chassis control systems. These systems require large amounts of data to be transmitted in short periods of time.
Protocol CAN (ISO Standard) LIN (LIN Consortium) AVC-LAN (TOYOTA Original) Communication Speed 500 kbps*/HS-CAN
250 kbps*/MS-CAN
(Max. 1 Mbps*)
9.6 kbps*
(Max. 20 kbps*)
Max. 17.8 kbps*/AVC-LAN 7.5
Mbps*/AVC-LAN plus
Communication Wire Twisted-pair Wire AV Single Wire Twisted-pair Wire Drive Type Differential Voltage Drive Single Wire Voltage Drive Differential Voltage Drive Data Length 1-8 Bytes (Variable) 2, 4, 8 Bytes
(Variable)
0-32 Byte(s)
(Variable)
Tech Tips
*: bps is an abbreviation of "Bits Per Second", indicating the number of bits that can be transmitted per second.
-
-
Communication Wire
-
A twisted pair of wires is used for CAN and AVC-LAN communication. A single Automobile Vinyl (AV) wire is used for LIN communication.
Communication Wire Outline Twisted-pair Wire 
This communication wire is a pair of twisted wires. Communication is driven by applying different voltages to the 2 lines in order to send a single signal. This system, which is called a "Differential Voltage Drive", reduces noise. AV Single Wire 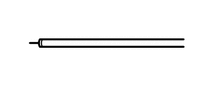
This is a lightweight single communication wire that consists of a single core line surrounded by insulation. Voltage is applied to this line in order to drive communication, and this system is called a "Single Wire Voltage Drive". Shield Twisted-pair Wire 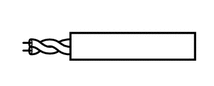
This communication wire is a shielded pair of twisted wires. Communication is driven by applying different voltages to the 2 lines in order to send a single signal. This system, which is called a "Differential Voltage Drive", reduces noise. 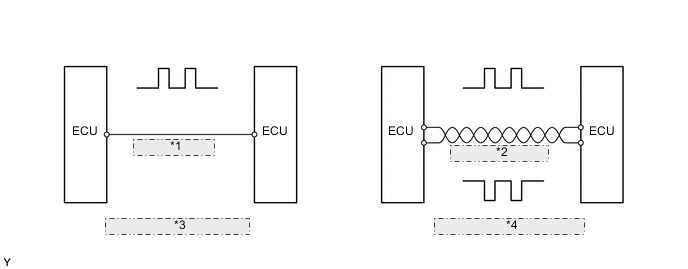
*1 AV Single Wire *2 Twisted-pair Wire *3 Single Wire Voltage Drive *4 Differential Voltage Drive
-
-