ADAPTIVE VARIABLE SUSPENSION SYSTEM
-
FUNCTION OF MAIN COMPONENTS
Component Function Absorber Control ECU (with Built-in Front Acceleration Sensor)
-
Estimates the condition of the vehicle in accordance with the signals provided by the sensors and switches, and outputs control signals to the absorber control actuators.
-
Detects the vertical acceleration rate of the body.
Absorber Control Actuator Changes the damping force of the shock absorber assembly. Driving Support ECU Assembly* Makes a request for damping force control to the absorber control ECU. Skid Control ECU Assembly
-
Sends the vehicle speed signal to the absorber control ECU.
-
Sends the brake pedal depressing signal to the absorber control ECU.
-
Makes a request for damping force control to the absorber control ECU.
Hybrid Vehicle Control ECU Assembly
-
Sends the engine speed signal to the absorber control ECU.
-
Sends information of drive mode selected through a drive mode select operation to the absorber control ECU.
Acceleration Sensor Detects the vertical acceleration rate of the body. Yawrate Sensor Detects the vehicle's longitudinal and lateral acceleration and deceleration. (For details, see Yawrate Sensor. Click here
Steering Sensor Detects the steering direction and the angle of the steering wheel. (For details, see Steering Sensor. Click here
Speed Sensor Detects the vehicle speed. Stop Light Switch Assembly Detects the brake pedal depressing signal. Combination Switch Assembly Drive Mode Select Switches the driving mode (NORMAL mode, ECO mode, CUSTOMIZE mode, SPORT S mode or SPORT S+ mode). Combination Meter Assembly Multi-information Display Displays the selected condition of the drive mode select. *: Models with pre-collision system
-
-
SYSTEM CONTROL
-
The absorber control ECU receives signals from the sensors and switches to control the absorber control actuators. The ECU uses these signals to optimally control the damping force in accordance with the driving conditions and road conditions.
-
The AVS effects the following controls:
Control Outline Roll Posture Control Regulates the damping force to reduce the phase difference between the vehicle roll and pitch angles during steering, thus providing smooth superior maneuverability. Repercussion Control (Non-linear H∞ Control) Smoothly changes the damping force to a target value in accordance with the changes in the road surface or driving conditions. In this way, excellent ride comfort is achieved while ensuring a high level of vibration damping performance. Vehicle Speed Sensing Control Controls damping force in accordance with vehicle speed, thus targeting both ride comfort at low speed and flat ride (high levels of stability) at high speed. Anti-dive Control Makes the damping force firmer to restrain body dive during braking, thus achieving excellent stability. Anti-squat Control Makes the damping force firmer during acceleration to minimize the changes in the vehicle body posture. Roughness Sensing Control Controls the shock absorber assemblies so that their damping force will not increase, when the road surface condition does not require a stronger damping force. Unsprung Damping Control Controls the shock absorber assemblies so that their damping force will not decrease below a certain level if unsprung resonance is detected, in order to reduce the unsprung resonance. VSC Operation Control Changes the damping force to control the vehicle posture during VSC operation (front or rear skid). Pre-collision System Operation Control* Switches damping force to the hard side in accordance with damping force control request signals from the driving support ECU assembly, and suppresses dive during braking. Damping Mode Selection The drive mode select enables the driver to select a desired damping force from the 2 modes. *: Models with pre-collision system
-
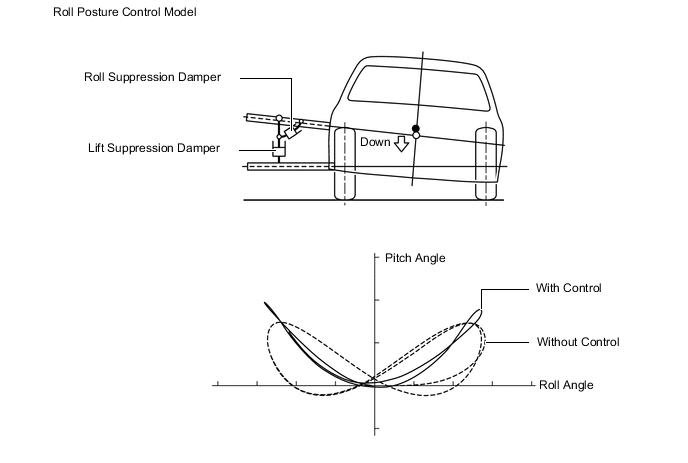
Roll Posture Control
-
In accordance with the steering sensor and yawrate sensor (deceleration sensor signal), the damping force of each wheel is controlled to optimize the vehicle posture condition while turning.
-
Using a roll posture control model, in which absorbers (for roll suppression and lift suppression) are located on the hypothetical inside turning point to control movement in 2 directions, damping force on the inside and outside turning sides is controlled with each of the 4 wheels independent. As a result, vehicle posture when turning is optimized, and groundholding performance is ensured.
-
Damping force is controlled to reduce the phase difference between the roll angle and pitch angle, thus achieving a vehicle posture compatible to the sensitivity of a human as well as comfortable steering.
-
-
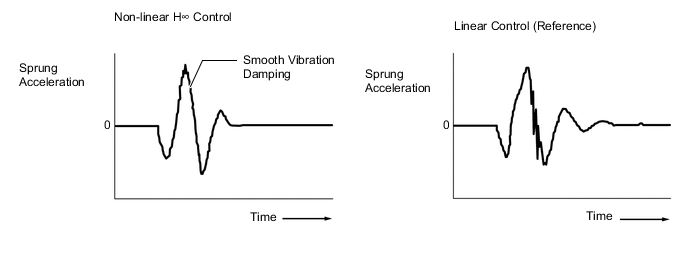
Repercussion Control (Non-linear H∞ Control)
-
In accordance with an acceleration sensor signal, the absorber control ECU detects vehicle vibrations (in the heave, roll and pitch directions) and controls the damping force of each of the 4 wheels using non-linear H∞ control logic. Therefore, vehicle repercussion is naturally and smoothly controlled, thus ensuring ride comfort.
-
-
Damping Mode Selection
-
Drive modes (NORMAL, ECO, SPORT S and SPORT S+) can be selected by a driving mode select operation.
-
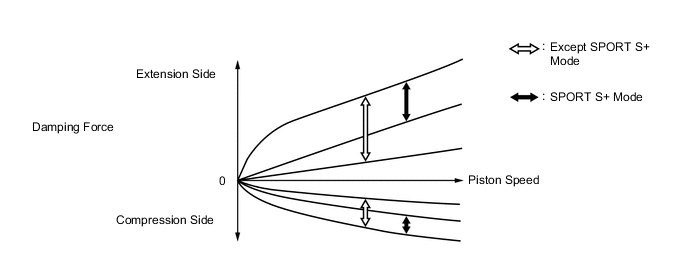
In NORMAL, ECO or SPORT S mode, stability is prioritized by damping force control which reacts to driving operation and road surface conditions, and control specification ensures that comfortable ride is also achieved.
-
Compared to NORMAL, ECO or SPORT S mode, SPORT S+ mode utilizes a high damping force region under damping force control, thus achieving control specification to enhance flat ride (stability) further.
-
In CUSTOMIZE mode, the damping force control mode (NORMAL or SPORT) can be selected.
Drive Mode Select Damping Force Control Mode NORMAL NORMAL ECO SPORT S SPORT S+ SPORT CUSTOMIZE NORMAL or SPORT 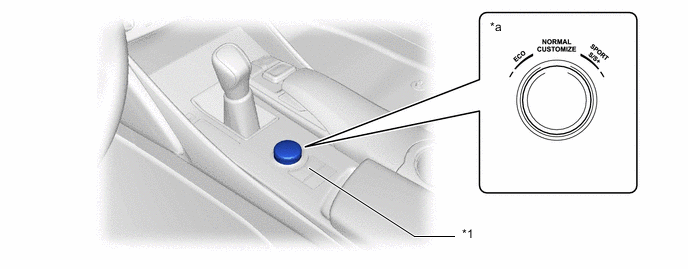
*1 Combination Switch Assembly - - *a Drive Mode Select - - Figure 1. Damping Force Characteristic (Image)
-
-
-
FAIL-SAFE
-
If a malfunction occurs in the AVS, the absorber control ECU prohibits the damping force control.
-
-
DIAGNOSIS
-
The absorber control ECU will also store a Diagnostic Trouble Code (DTC). The DTC can be accessed through the use of a Global TechStream (GTS). For details, refer to the Repair Manual.
-