СИСТЕМА КОНТРОЛЯ СЛЕПЫХ ЗОН
-
КОНСТРУКЦИЯ
-
Датчик системы контроля слепых зон содержит схему радара миллиметрового диапазона и схему обработки сигналов.
-
Датчик радара миллиметрового диапазона использует частоты диапазона 24 ГГц.
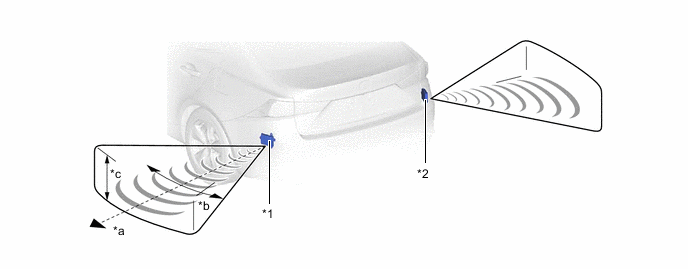
*1 Левый датчик системы контроля слепых зон *2 Правый датчик системы контроля слепых зон *a Расстояние: Приблизительно 50 м (164 фута) *b Горизонтальный угол: Приблизительно 150° *c Вертикальный угол: Приблизительно 20° - -
-
По информации, обеспечиваемой радаром миллиметрового диапазона, рассчитываются расстояние до объекта, азимут и относительная скорость, как рассмотрено ниже.
Параметр / Устройство Метод расчета Distance Рассчитывается по времени, прошедшему с момента излучения волн радаром миллиметрового диапазона до момента приема отраженных волн. Дистанция приблизительно 50 м (164 фута). Азимут Рассчитывается в зависимости от угла приема волн миллиметрового диапазона, излученных радаром. Диапазоны угла обнаружения составляют примерно 150° по горизонтали и 20° по вертикали. Относительная скорость Рассчитывается по изменениям частот отраженных волн радара миллиметрового диапазона (вследствие эффекта Доплера*). Tech Tips
*: Эффект Доплера заключается в том, что при приближении объекта к наблюдателю воспринимаемая частота излучаемых объектом радиоволн увеличивается, а при удалении – уменьшается. Этот эффект проявляется, так как когда объект находится далеко, принимаемые радиоволны имеют более высокую частоту по сравнению с частотой источника излучения. Для подтверждения диаграммы направленности радара применяется SST. Более подробную информацию см. в Руководстве по ремонту.
-
-