СИСТЕМА УПРАВЛЕНИЯ ГИБРИДНОЙ СИСТЕМОЙ
-
КОНСТРУКЦИЯ
-
В бесконтактном датчике положения педали акселератора используется элемент Холла.
-
Ярмо магнита, расположенное в основании рычага педали акселератора, поворачивается вокруг датчика Холла согласно усилию, действующему на педаль акселератора. Датчик Холла преобразует возникающие при этом изменения магнитного потока в электрические сигналы, отражающие положение педали акселератора, и передает их в ECM.
-
Датчик положения педали акселератора содержит 2 элемента Холла, включенных в цепи основного и вспомогательного сигналов. Датчик преобразует угол поворота педали акселератора в 2 различающихся по характеристикам электрических сигнала и передает их в ECM.
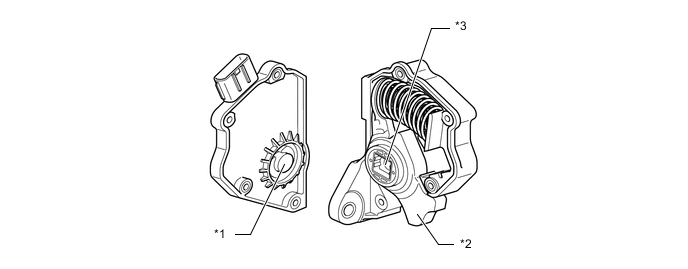
*1 Датчик Холла *2 Рычаг педали акселератора *3 Ярмо магнита - - 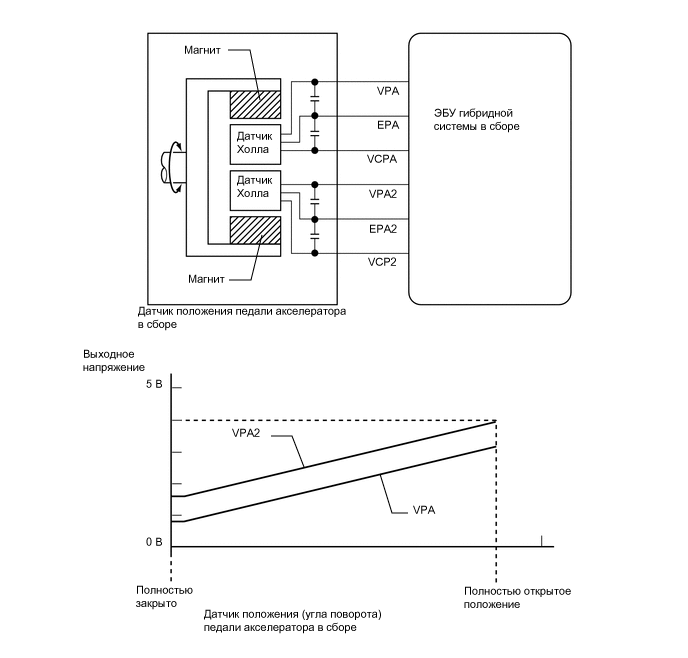
-