POWER STEERING SYSTEM
-
CONSTRUCTION
-
The torque sensor consists of 2 resolver sensors (resolver sensor 1 and resolver sensor 2).
-
Resolver sensor 1 is mounted on the input side of the main shaft. Resolver sensor 2 is mounted on the output side of the pinion shaft.
-
These resolver sensors convert twisting force on the input and output sides of the torsion bar into electric signals and transmit these signals to the power steering ECU assembly.
-
The signals sent from the input and output sides differ depending on the amount of twisting force. The power steering ECU assembly calculates the torque value based on the differences in these signals.
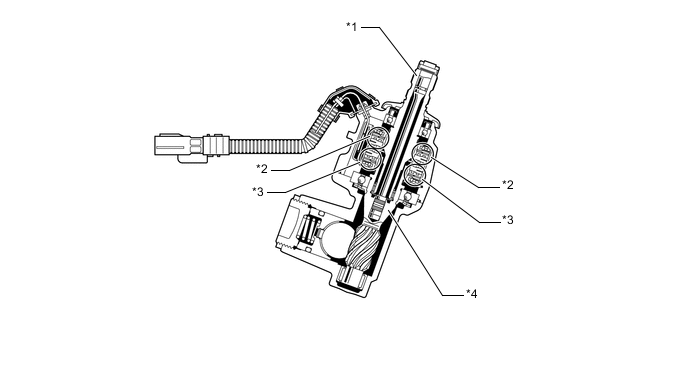
*1 Main Shaft *2 Resolver Sensor 1 *3 Resolver Sensor 2 *4 Pinion Shaft -
If the vehicle is driven straight and the driver does not turn the steering wheel assembly, the specified voltage that is output at this time is determined by the power steering ECU assembly to indicate the neutral position of the steering wheel assembly. Therefore, the power steering ECU assembly does not apply power to the motor.
-
When the driver turns the steering wheel assembly, a relative angle difference is created between the rotor portions of resolver sensor 1 and resolver sensor 2, only in the amount that is equivalent to the twisting of the torsion bar.
-
The stator portions of the resolver sensor 1 and resolver sensor 2 receive the angles of the rotors in the form of electric signals and output them to the power steering ECU assembly. Based on these input signals, the power steering ECU assembly calculates the relative angle difference between the angles detected by the 2 resolver sensors.
-
The power steering ECU assembly calculates the torque value based on that difference. Then, the power steering ECU assembly calculates the assist power current based on the calculated torque value and vehicle speed. Using the information obtained from the rotation angle sensor, the power steering ECU assembly actuates the motor at a predetermined current.
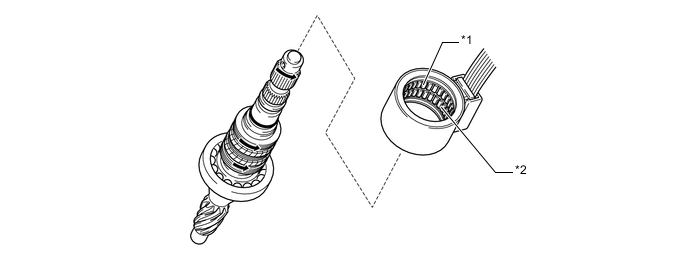
*1 Resolver Sensor 1 *2 Resolver Sensor 2 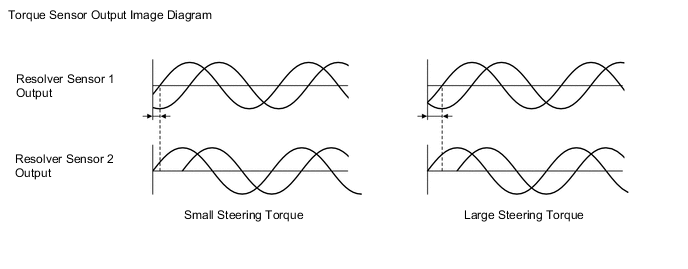
-