СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ
-
УПРАВЛЕНИЕ В СИСТЕМЕ
-
Используются VSC и управление, координированное с EPS*1 или VSC+*2.
*1: Модели для общей группы стран
*2: для моделей для Европы
-
Регулирование тормозного усилия на дорогах с высоким и низким коэффициентом трения
-
Тормозное усилие увеличивается в зоне с большим μ (коэффициентом трения), и автомобиль отклоняется вправо (в сторону с большим μ). Поэтому передние колеса поворачиваются, направляя автомобиль влево и противодействуя моменту, создаваемому в направлении вращения.
Figure 1. Общая схема работы
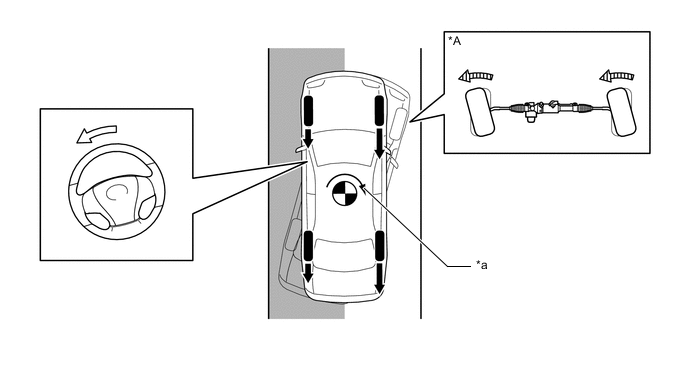
*A для моделей с системой рулевого управления с переменным передаточным числом - - *a Момент, создаваемый вследствие различия тормозных усилий слева и справа - - 
Тормозное усилие 
Направление усиления крутящего момента рулевого управления 
Направление регулирования угла поворота передних колес 
Скользкая поверхность
-
-
Управление ускорением на дорогах с высоким и низким коэффициентом трения
-
Тяговое усилие увеличивается в зоне с большим μ (коэффициентом трения), и автомобиль смещается влево (в сторону с малым μ). Поэтому передние колеса поворачиваются, направляя автомобиль вправо и противодействуя моменту, создаваемому в направлении вращения.
Figure 2. Общая схема работы
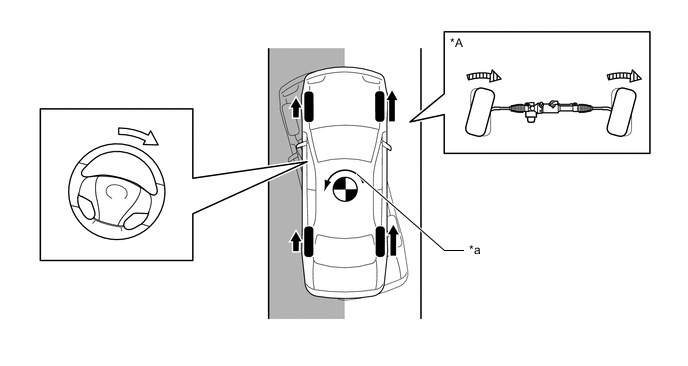
*A для моделей с системой рулевого управления с переменным передаточным числом - - *a Момент, создаваемый вследствие различия тяговых усилий слева и справа - - Тяговое усилие Направление усиления крутящего момента рулевого управления Направление регулирования угла поворота передних колес Скользкая поверхность Tech Tips
-
На моделях без системы VGRS движение автомобиля по прямой обеспечивается посредством VDIM.
-
На моделях с системой VGRS вследствие улучшения курсовой устойчивости во время управления возможно поддержание высокого тормозного и тягового усилий.
-
-
-
Управление при избыточной поворачиваемости
-
Когда задние колеса сносит в сторону, движение автомобиля стабилизируется за счет нормального управления тормозами, регулирования тягового усилия и рулевого управления передними колесами. Стабилизирующий момент создается не только за счет тормозного и тягового усилий, но и благодаря рулевому управлению, что обеспечивает стабилизацию автомобиля без ощущения чрезмерного замедления.
Figure 3. Общая схема работы
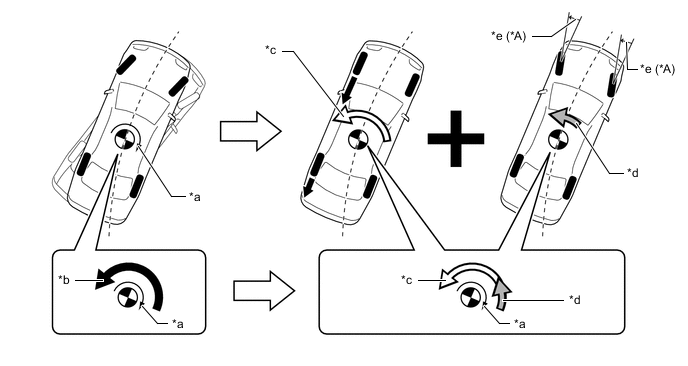
*A для моделей с системой рулевого управления с переменным передаточным числом - - *a Момент заноса задних колес *b Момент, необходимый для уменьшения избыточной поворачиваемости *c Момент управления, создаваемый при управления тормозами и регулировании тягового усилия *d Управляющий момент, создаваемый системами EPS и VGRS *e Регулирование угла поворота передних колес - -
-
-
Управление при недостаточной поворачиваемости
-
Тормозное и тяговое усилия регулируются таким образом, чтобы создать усилие в направлении, совпадающем с направлением поворота, уменьшая тем самым чрезмерный боковой снос. Кроме того, для уменьшения чрезмерного поворота передних колес изменяется передаточное число рулевого управления VGRS. В направлении возврата рулевого колеса создается вспомогательный крутящий момент, помогающий водителю выполнить рулевое управление.
Figure 4. Общая схема работы
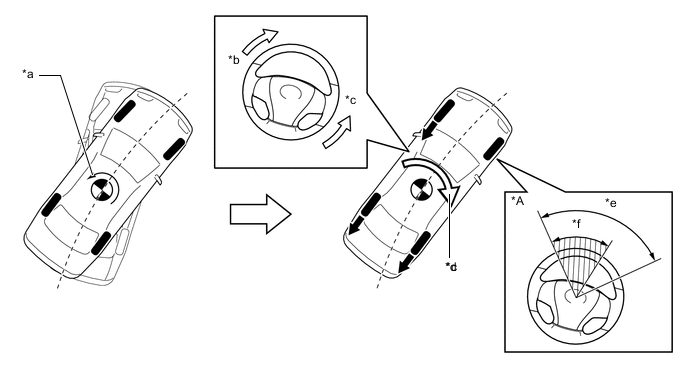
*A для моделей с системой рулевого управления с переменным передаточным числом - - *a Момент заноса передних колес *b Направление усиления крутящего момента рулевого управления для информирования о заносе передних колес *c Направление усиления крутящего момента рулевого управления для предотвращения избыточного поворачивания *d Момент управления, создаваемый при управления тормозами и регулировании тягового усилия *e Угол поворота рулевого колеса *f Фактический угол поворота передних колес
-
-
-