РЕГУЛИРУЕМАЯ АДАПТИВНАЯ ПОДВЕСКА
-
ОПИСАНИЕ
-
На автомобиле может быть установлена регулируемая адаптивная подвеска (AVS).
-
AVS регулирует демпфирующие усилия амортизаторов всех 4 колес в соответствии с условиями движения и состоянием дорожной поверхности. Это позволяет обеспечить комфорт во время движения, исключительную управляемость и превосходную устойчивость.
-
AVS представляет собой полуактивную (приспосабливающуюся) подвеску. Его ЭБУ амортизаторов оценивает состояние автомобиля на основании сигналов от датчиков и переключателей. Затем ЭБУ амортизаторов приводит в действие привод каждого амортизатора, изменяет поток масла и, таким образом, регулирует демпфирующее усилие.
-
С помощью переключателя выбора режима привода водитель может установить один из 2 типов демпфирующего усилия амортизаторов.
-
В качестве базового управления для регулирования демпфирующего усилия используется нелинейное управление H∞.
Tech Tips
-
В теории управления H∞ изучаются вопросы проектирования регуляторов, удовлетворяющих требованиям к системе управления, которые сформулированы с использованием нормы H∞ (единица измерения передаточной функции в системе). Когда эта теория распространяется на нелинейные системы, управление называют "нелинейным управлением H∞".
-
"H" – первая буква фамилии ученого-математика Харди (Hardy) (изучавшего теорию устойчивости систем управления), исследовавшего математическую терию, которой оперируют в рамках данной теории управления. Символ "∞" представляет собой "норму ∞" – одно из математических обозначений, применяемых для измерения величины сигналов.
-
-
-
ОСНОВНЫЕ ОСОБЕННОСТИ
-
Комфорт при движении
-
Так как вибрации в направлении крена могут создавать дискомфорт для пассажиров, реализовано управление отдачей (нелинейное управление H∞), обеспечивающее регулирование положения кузова в направлении крена.
-
При управлении отдачей управление 4 колесами производится одновременно и обеспечивает подавление вибраций в направлениях подъема, крена и продольного наклона. В результате обеспечивается подавление вибраций в направлениях крена и продольного наклона при сохранении традиционного подавления вибраций в направлении подъема.
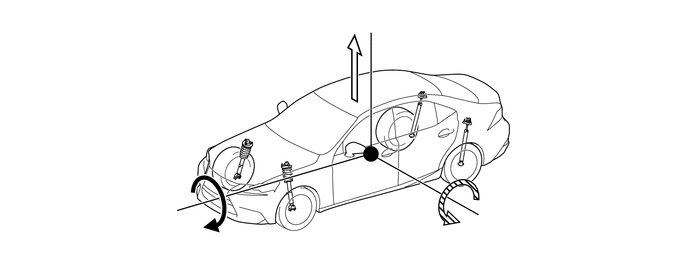

Крен 
Подъем 
Продольный наклон - -
-
-
Изменение положения автомобиля
-
Методы определения состояния автомобиля направлены на обеспечение комфортного рулевого управления, способствующего правильному регулированию угла крена.
-
По сравнению с обычным регулированием угла крена, основанным на сигнале датчика положения рулевого колеса, активно используется сигнал датчика рысканья (датчика замедления), позволяющий точнее определять состояние автомобиля на повороте, оптимизируя и сглаживая переключение демпфирующего усилия. В результате положение автомобиля изменяется естественно и плавно.
-
-