МУЛЬТИПЛЕКСНАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ ОБЩИЕ СВЕДЕНИЯ
-
ОПИСАНИЕ
-
В мультиплексной системе передачи данных используются следующие 3 протокола передачи данных:
-
Протокол CAN (локальная сеть контроллеров) используется для передачи данных между двигателем, шасси и электрооборудованием автомобиля.
-
Шина LIN (локальная сеть передачи данных) обеспечивает передачу данных в пределах системы электрооборудования автомобиля.
-
Шина AVC-LAN обеспечивает обмен данными только между устройствами аудиовизуальной системы (AV).
-
-
Существуют 2 типа протоколов CAN, различающихся скоростью передачи данных: HS-CAN (высокоскоростной) и MS-CAN (среднескоростной).
-
Сетевой шлюз, реализованный посредством главного ЭБУ кузова и ЭБУ распределения питания, преобразует сигналы, передаваемые между шинами CAN и LIN.
-
К одной линии шинной сети может быть подключено лишь ограниченное число ЭБУ. При подключении числа ЭБУ, превышающего максимальное, необходимо разделить линию шинной сети на две или более линии. ЭБУ сетевого шлюза выполняет функцию шлюза и разделяет линии шинной сети.
-
-
ОСНОВНЫЕ ОСОБЕННОСТИ
-
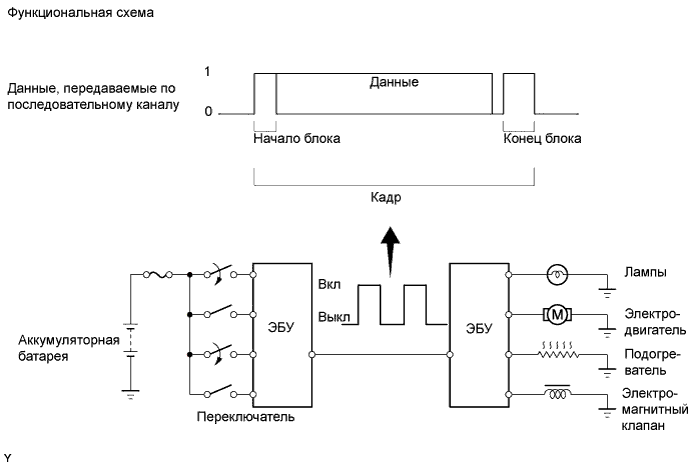
Мультиплексная система передачи данных представляет собой последовательную систему передачи данных, представляемых битами и кадрами, между различными ЭБУ. Она позволяет сократить количество проводов в автомобиле.
-
Бит представляет собой элементарную единицу передаваемых данных. Он может принимать одно из двух значений: "0" или "1".
-
Кадр представляет собой блок данных, передаваемых совместно. Он содержит заголовок, указывающий начало блока данных, и код конца, указывающий конец блока.
-
-
Различия между CAN, LIN и AVC-LAN
-
Шины CAN, LIN и AVC-LAN различаются применяемыми в них протоколами, определяющими правила передачи данных. Если ЭБУ в сетях используют разные методы передачи данных (например, различаются скорости передачи данных, проводка, сигналы), они не смогут взаимодействовать.
-
По сравнению с шинами LIN и AVC-LAN шина CAN обеспечивает более высокую скорость передачи данных. Поэтому CAN позволяет передавать большие объемы данных быстрее, чем другие протоколы. Это дает возможность организовать безошибочный обмен данными между системами управления силовой передачи и шасси. Для этих систем требуется передавать большие объемы данных за короткое время.
Протокол CAN (стандарт ISO) LIN (ассоциация LIN) AVC-LAN (TOYOTA) Скорость передачи данных 500 кбит/с*/HS-CAN
250 кбит/с*/MS-CAN
(Макс. 1 Мбит/с*)
9,6 кбит/с*
(Макс. 20 кбит/с*)
Макс. 17,8 кбит/с*/AVC-LAN 7,5
Мбит/с*/AVC-LAN plus
Кабель связи Витая пара Одиночный кабель AV Витая пара Тип привода Дифференциальная линия передачи напряжения Однопроводная линия передачи напряжения Дифференциальная линия передачи напряжения Длина слова данных 1-8 байтов (переменная) 2, 4, 8 байтов
(переменная)
0-32 байта
(переменная)
Tech Tips
*: бит/с – обозначение единицы измерения скорости передачи данных, показывающей, сколько битов может быть передано за одну секунду.
-
-
Кабель связи
-
Передача данных в сетях CAN и AVC-LAN осуществляется по витым парам. В сети LIN используются одиночные автомобильные виниловые кабели (AV).
Кабель связи Описание Витая пара 
Этот кабель представляет собой скрученную пару проводов. Передача одного сигнала осуществляется путем подачи разных напряжений на 2 провода кабеля. Эта система, называемая "дифференциальной линией передачи напряжения", обеспечивает снижение уровня помех. Одиночный кабель AV 
Легкий одиночный кабель передачи данных, состоящий из одной жилы, окруженной изоляцией. В процессе передачи данных на эту жилу подается напряжение, а вся система называется "однопроводной линией передачи напряжения". Экранированная витая пара 
Этот кабель представляет собой экранированную скрученную пару проводов. Передача одного сигнала осуществляется путем подачи разных напряжений на 2 провода кабеля. Эта система, называемая "дифференциальной линией передачи напряжения", обеспечивает снижение уровня помех. 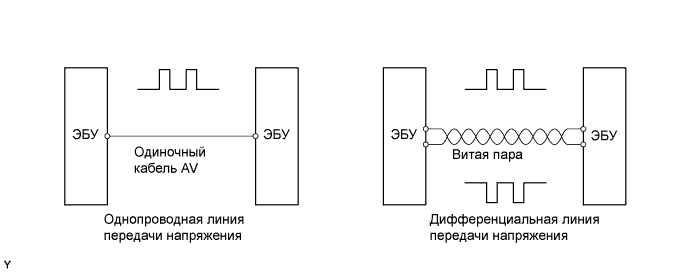
-
-