MULTIPLEX COMMUNICATION
-
DESCRIPTION
-
The multiplex communication system uses the following 4 communication protocols:
-
The Controller Area Network (CAN) is used for communication between the engine, chassis, and body electrical system.
-
The Local Interconnect Network (LIN) is used for communication within the body electrical system.
-
The Audio Visual Communication-Local Area Network (AVC-LAN) is used for communication only between the Audio Visual (AV) system components.
-
The Media Orientated System Transport (MOST) is used for communication within the Audio Visual (AV) system components.
-
-
There are two types of CAN communication systems, with different communication speeds: the HS-CAN (high speed) and the MS-CAN (medium speed).
-
The central gateway ECU and main body ECU are used as gateways to transmit data between the buses.
-
-
MAIN FEATURES
-
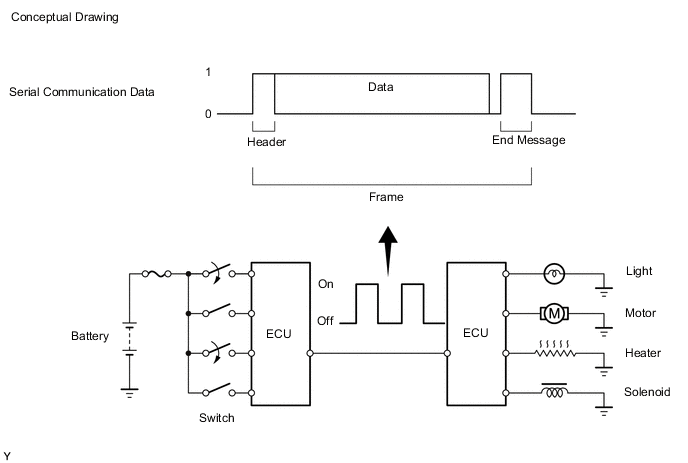
Multiplex communication uses serial communication data that consists of bits and frames in order to exchange information between the various ECUs. This allows a reduction of the amount of wiring used in the vehicle.
-
A bit is the basic unit of communication used to represent the information. A bit is represented by binary values of "0" or "1".
-
A frame is a body of data transmitted together. A frame contains a header that indicates the beginning, and an end message that indicates the end.
-
-
-
DIFFERENCES BETWEEN CAN, LIN, AVC-LAN AND MOST
-
GENERAL
-
The protocols, which are the rules for establishing data communication, differ between CAN, LIN, AVC-LAN and MOST. If the ECUs in the networks use different data frameworks such as communication speed, communication wire or signals, they will be unable to understand each other. Therefore, protocols (rules) must be established among them.
-
Compared to LIN and AVC-LAN, CAN features high-speed data transmission. Therefore, CAN is able to transmit larger amounts of data faster than other protocols. This feature makes it possible to transmit data accurately for the powertrain and chassis control systems. These systems require large amounts of data to be transmitted in short periods of time.
-
MOST is used to transmit control information, audio, video, and data in real time.
Protocol CAN (ISO Standard) LIN (LIN Consortium) AVC-LAN MOST Communication Speed 500kbps*/ HS-CAN 250kbps*/ MS-CAN (Max. 1 M bps) Max. 20 kbps* Max. 17.8 kbps Max. 50 Mbps* Communication Wire Twisted-pair Wire AV Single Wire Twisted-pair Wire Shielded Twistedpair Wire Drive Type Differential Voltage Drive Single Wire Voltage Drive Differential Voltage Drive Data Length 1-8 Byte (Variable) 2, 4, 8 Byte (Variable) 0-32 Byte (Variable) 0-128 Byte (Variable) *: bps: abbreviation for "Bits Per Second", indicating the number of bits that can be transmitted per second.
-
-
-
COMMUNICATION WIRE
-
A twisted pair of wires is used for CAN and AVC-LAN communication. A single Automobile Vinyl (AV) wire is used for LIN communication.
Communication Wire Outline Twisted-pair Wire 
This communication wire is a pair of twisted wires. Communication is driven by applying different voltages to the 2 lines in order to send a single signal. This system, which is called a "Differential Voltage Drive", reduces noise. AV Single Wire 
This is a lightweight single communication wire that consists of a single core line surrounded by insulation. Voltage is applied to this line in order to drive communication, and this system is called a "Single Wire Voltage Drive". Shielded Twistedpair Wire 
This communication wire is a shielded pair of twisted wires. Communication is driven by applying different voltages to the 2 lines in order to send a single signal. This system, which is called a "Differential Voltage Drive", reduces noise. 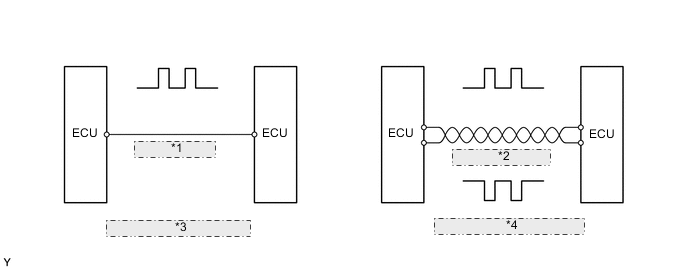
*1 AV Single Wire *2 Twisted-pair Wire *3 Single Wire Voltage Drive *4 Differential Voltage Drive
-
-
SYSTEM DIAGRAM
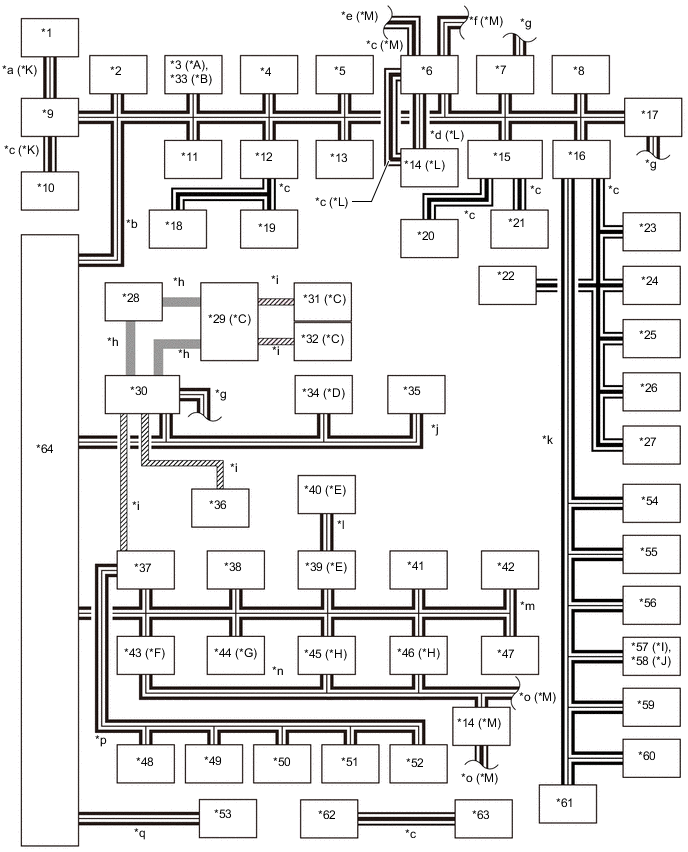
*A Models with Tire Pressure Warning System *B Models with Electrical Key and TPMS Receiver Assembly *C Models with Rear Seat Entertainment (RSE) System *D Models with G-BOOK System *E Models with Blind Spot Monitor System *F Models with Forward Recognition Camera *G Models without Pre-crash Safety System *H Models with Pre-crash Safety System *I LHD Models *J RHD Models *K Models with 3UR-FE Engine *L Models without AHS *M Models with AHS - - *1 Transmission Control Computer Assembly *2 4 Wheel Drive Control ECU *3 Electrical Key and TPMS Receiver Assembly *4 Steering Control ECU *5 Skid Control ECU *6 Headlight Main Computer Sub-assembly *7 Meter Mirror Sub-assembly *8 Power Steering ECU Assembly *9 ECM *10 Generator Assembly *11 Airbag Sensor Assembly *12 Smart Key ECU Assembly *13 Steering Sensor *14 Headlight Sub Computer Sub-assembly *15 Air Conditioning Amplifier Assembly *16 Main Body ECU (Multiplex Network Body ECU) *17 Combination Meter Assembly *18 Steering Lock Actuator Assembly *19 Immobiliser Code ECU *20 No. 2 Air Conditioning Control Assembly *21 Refreshing Seat Switch *22 Sliding Roof ECU *23 Power Window Regulator Motor Assembly LH (Front) *24 Multiplex Network Master Switch Assembly *25 Power Window Regulator Motor Assembly RH (Front) *26 Power Window Regulator Motor Assembly RH (Rear) *27 Power Window Regulator Motor Assembly LH (Rear) *28 Stereo Component Amplifier Assembly *29 Multi-display Controller Sub-assembly *30 Multi-media Module Receiver Assembly *31 Television Display Assembly RH *32 Television Display Assembly LH *33 Electrical Key and TPMS Receiver Assembly *34 DCM (Telematics Transceiver) *35 No. 2 CAN Junction Connector *36 Multi-display Assembly *37 Parking Assist ECU *38 Clearance Warning ECU Assembly *39 Blind Spot Monitor Sensor LH *40 Blind Spot Monitor Sensor RH *41 No. 1 CAN Junction Connector *42 Parking Brake ECU Assembly *43 Forward Recognition Camera *44 Inner Rear View Mirror Assembly *45 Driving Support Computer Assembly *46 Millimeter Wave Radar Sensor Assembly *47 Suspension Control ECU *48 Front Television Camera Assembly *49 Outer Rear View Mirror Assembly LH *50 Outer Rear View Mirror Assembly RH *51 Television Camera with Dynamic Guide Line Assembly *52 No. 16 CAN Junction Connector *53 DLC3 *54 No. 2 Multiplex Network Body ECU *55 Outer Mirror Control ECU Assembly LH *56 Outer Mirror Control ECU Assembly RH *57 Front Power Seat Switch LH *58 Front Power Seat Switch RH *59 Multiplex Tilt and Telescopic ECU *60 Power Back Door Unit Assembly *61 No. 9 CAN Junction Connector *62 Rain Sensor *63 Windshield Wiper Relay Assembly *64 Central Gateway ECU *a CAN (Sub Bus 15) *b CAN (Bus 2) *c LIN *d CAN (Local Bus 5) *e to/from Headlight Sub Computer Sub-assembly *f to/from CAN (Local Bus 2) *g to/from CAN (Local Bus 1) *h MOST *i AVC-LAN *j CAN (Sub Bus 1) *k CAN (Bus 3) *l CAN (Local Bus 3) *m CAN (Bus 5) *n CAN (Local Bus 2) *o to/from Headlight Main Computer Sub-assembly *p CAN (Local Bus 4) *q CAN (V Bus) - - 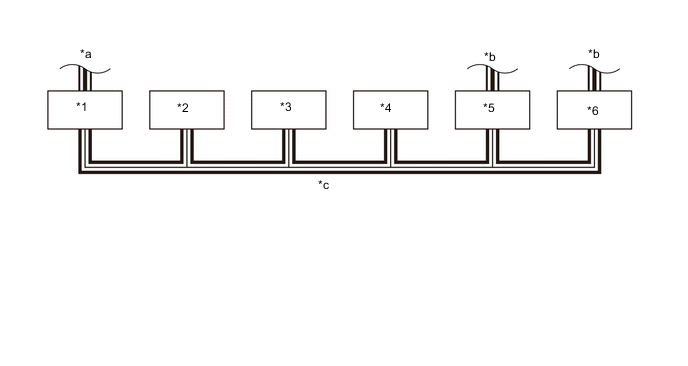
*1 Multi-media Module Receiver Assembly *2 Clock Assembly *3 Accessory Meter Assembly *4 Remotye Operation Controller Assembly *5 Combination Meter Assembly *6 Meter Mirror Sub-assembly *a to/from Bus 3 *b to/from Bus 2 *c CAN (Local Bus 1) - -