СИСТЕМА КОНТРОЛЯ СЛЕПЫХ ЗОН ДЕТАЛЬНОЕ ОПИСАНИЕ
-
НАЗНАЧЕНИЕ ОСНОВНЫХ УСТРОЙСТВ
Устройство Назначение Левый и правый датчики системы контроля слепых зон
-
Излучает волны радара от датчика системы контроля слепых зон в область обнаружения датчика системы контроля слепых зон, по отраженным волнам миллиметрового диапазона определяет наличие автомобиля, дистанцию между автомобилями и относительную скорость, а затем передает эти данные во встроенную схему обработки сигналов.
-
Схема обработки сигналов принимает решение о наличии автомобиля и соответствующим образом обеспечивает включение или мигание контрольной лампы наружного зеркала заднего вида.
Главный выключатель системы контроля слепых зон Нажатие главного выключателя системы контроля слепых зон вызывает включение или выключение системы контроля слепых зон. Левое и правое наружные зеркала заднего вида в сборе Контрольная лампа наружного зеркала заднего вида
-
Включается, чтобы уведомить водителя о наличии автомобиля в области обнаружения системы контроля слепых зон.
-
Мигает, чтобы уведомить водителя о том, что приведен в действие переключатель указателей поворота, когда в области обнаружения системы контроля слепых зон обнаружен автомобиль.
Щиток приборов в сборе Передает сигнал переключателя указателей поворота в левый и правый датчики системы контроля слепых зон. Щиток приборов в сборе Мультиинформационный дисплей Отображает сообщение "Check BSM System" (проверьте систему BSM), когда система контроля слепых зон неисправна, и "BSM not available" (BSM не доступна), когда система временно не может использоваться. Датчик положения рулевого колеса Передает сигнал угла поворота рулевого колеса в левый и правый датчики системы контроля слепых зон. ЭБУ системы противоскольжения в сборе Передает сигнал скорости автомобиля в левый и правый датчики системы контроля слепых зон. Главный ЭБУ кузова (бортовой ЭБУ сети мультиплексной связи) Передает сигнал данных о рынке сбыта в левый и правый датчики системы контроля слепых зон. ЭБУ сетевого шлюза Передает данные между шиной V CAN и вспомогательной шиной 2*1 или вспомогательной шиной 18*2 CAN. ЭБУ распределения питания Передает сигнал заднего хода в левый и правый датчики системы контроля слепых зон.
-
*1: для моделей без системы динамического управления Lexus
-
*2: для моделей с системой динамического управления Lexus
-
-
УСЛОВИЯ РАБОТЫ
-
Система монитора контроля слепых зон работает при выполнении обоих указанных ниже условий.
-
Главный выключатель системы контроля слепых зон включен.
-
Скорость автомобиля превышает 40 км/час (25 миль в час).
-
-
Система контроля слепых зон способна обнаруживать автомобили в своих областях обнаружения.
-
Области обнаружения формируются левым и правым датчиками системы контроля слепых зон, как показано ниже:
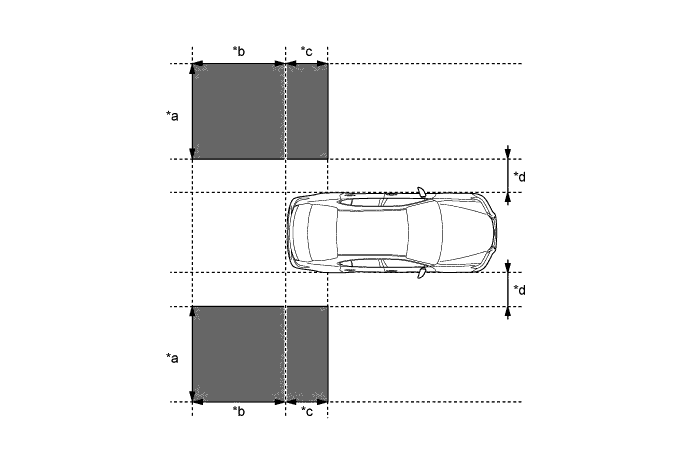
Обозначения на рисунке *a 3,5 м (11,5 фута) *b 3,0 м (9,8 фута) *c 1,0 м (3,3 фута) *d 0,5 м (1,6 фута) 
Зона обнаружения - - -
Другой автомобиль на соседней полосе догоняет управляемый автомобиль.
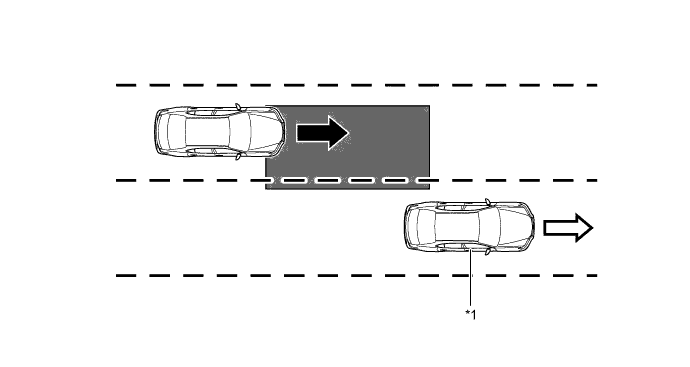
Обозначения на рисунке *1 Управляемый автомобиль - - 
Скорость автомобиля (высокая) 
Скорость автомобиля (низкая) Зона обнаружения - - -
Другой автомобиль попадает в область обнаружения управляемого автомобиля вследствие перестроения.
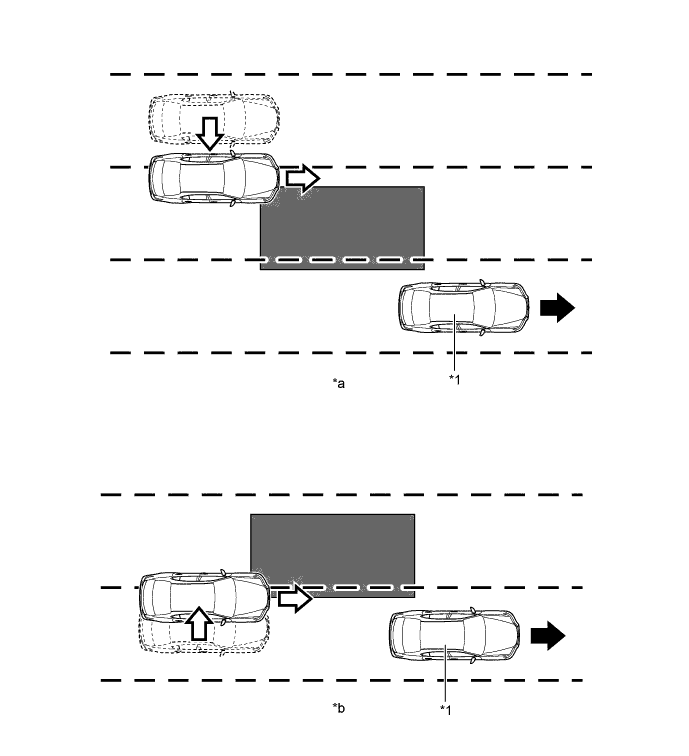
Обозначения на рисунке *1 Управляемый автомобиль - - *a Другой автомобиль попадает в область обнаружения во время перестроения (присоединение) (тип 1). *b Другой автомобиль попадает в область обнаружения во время перестроения (присоединение) (тип 2). Направление перемещения управляемого автомобиля Направление перемещения другого автомобиля Зона обнаружения - -
-
-
-
КОНСТРУКЦИЯ
-
Датчик системы контроля слепых зон
-
Датчик системы контроля слепых зон содержит схему радара миллиметрового диапазона и схему обработки сигналов.
-
Датчик радара миллиметрового диапазона использует частоты диапазона 24 ГГц.
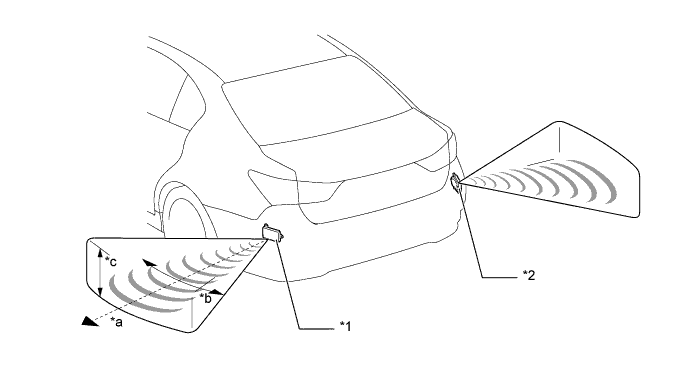
Обозначения на рисунке *1 Левый датчик системы контроля слепых зон *2 Правый датчик системы контроля слепых зон *a Расстояние: Приблизительно 50 м (164 фута) *b Горизонтальный угол: Приблизительно 150° *c Вертикальный угол: Приблизительно 20° - - -
По информации, обеспечиваемой радаром миллиметрового диапазона, рассчитываются расстояние до объекта, азимут и относительная скорость, как рассмотрено ниже:
Описание Метод расчета Расстояние Рассчитывается по времени, прошедшему с момента излучения волн радаром миллиметрового диапазона до момента приема отраженных волн. Дистанция приблизительно 50 м (164 фута). Азимут Рассчитывается в зависимости от угла приема волн миллиметрового диапазона, излученных радаром. Диапазоны угла обнаружения составляют примерно 150° по горизонтали и 20° по вертикали. Относительная скорость Рассчитывается по изменениям частот отраженных волн радара миллиметрового диапазона (вследствие эффекта Доплера*). Tech Tips
*: Эффект Доплера заключается в том, что при приближении объекта к наблюдателю воспринимаемая частота излучаемых объектом радиоволн увеличивается, а при удалении – уменьшается. Этот эффект проявляется когда объект находится далеко, а принимаемые радиоволны имеют более высокую частоту по сравнению с частотой источника излучения. Для подтверждения диаграммы направленности радара применяется SST. Более подробную информацию см. в руководстве по ремонту.
-
-
-
ПРИНЦИП РАБОТЫ
-
В соответствии с условиями работы система контроля слепых зон предлагает водителю убедиться в безопасности, информируя его с помощью контрольной лампы наружного зеркала заднего вида о том, что другой автомобиль попал в область обнаружения системы контроля слепых зон управляемого автомобиля.
-
Контрольная лампа наружного зеркала заднего вида информирует водителя о наличии автомобиля в области обнаружения системы контроля слепых зон, загораясь, когда переключатель указателей поворота не нажат, и мигая, когда имеется автомобиль, и переключатель указателей поворота нажат.
-
-
ДИАГНОСТИКА
-
Функция диагностики системы контроля слепых зон выводит на мультиинформационный дисплей щитка приборов сообщение "Check BSM System" (проверьте систему BSM), когда система неисправна, и сообщение "BSM not available" (BSM не доступна), когда система временно не может использоваться. Более подробную информацию см. в руководстве по ремонту.
-