СИСТЕМА КОНТРОЛЯ СЛЕПЫХ ЗОН
-
ФУНКЦИЯ КОНТРОЛЯ СЛЕПЫХ ЗОН
-
Функция контроля слепых зон работает при выполнении обоих указанных ниже условий.
-
Главный выключатель системы контроля слепых зон включен.
-
Рычаг переключения передач находится в любом положении, кроме R.
-
Скорость автомобиля превышает 16 км/час (10 миль в час).
-
-
Функция контроля слепых зон способна обнаруживать автомобили в своих областях обнаружения.
-
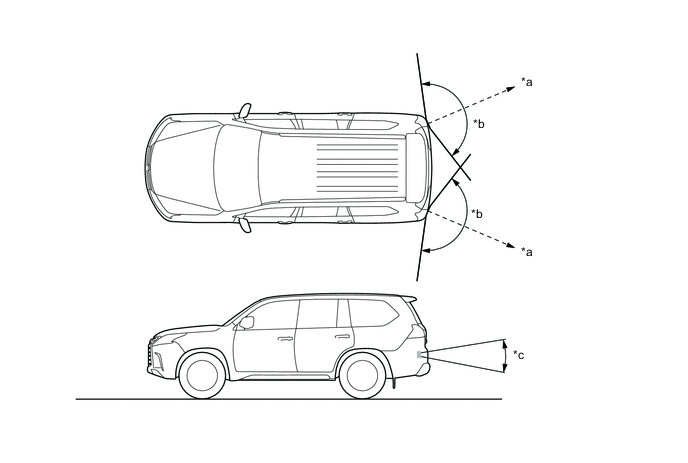
Области обнаружения формируются левым и правым датчиками системы контроля слепых зон, как показано ниже:
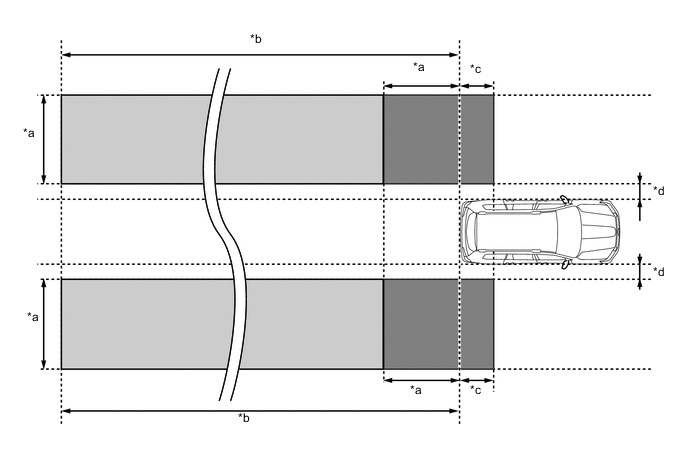
*a 3,0 м (9,8 фута) *b 60 м (197 футов) *c 1,0 м (3,3 фута) *d 0,5 м (1,6 фута) Tech Tips
Когда обнаруживается другой автомобиль, который быстро приближается к слепой зоне управляемого автомобиля, время выдачи уведомления определяется по относительной скорости приближающегося автомобиля. Время выдачи уведомления для автомобилей, быстро приближающихся к слепой зоне управляемого автомобиля, может быть настроено. Более подробную информацию см. в Руководстве по ремонту.
-
-
Область обнаружения (для автомобиля в слепой зоне)
-
Другой автомобиль на соседней полосе догоняет управляемый автомобиль.
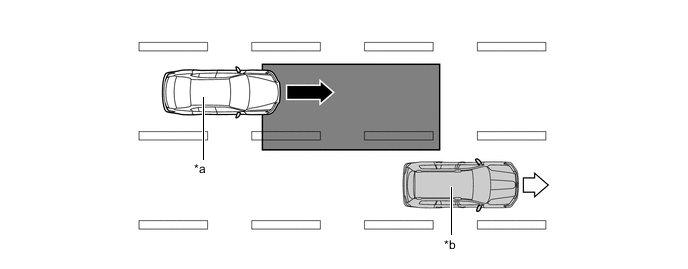
*a Другой автомобиль *b Данный автомобиль 
Скорость автомобиля (высокая) 
Скорость автомобиля (низкая) 
Зона обнаружения - - -
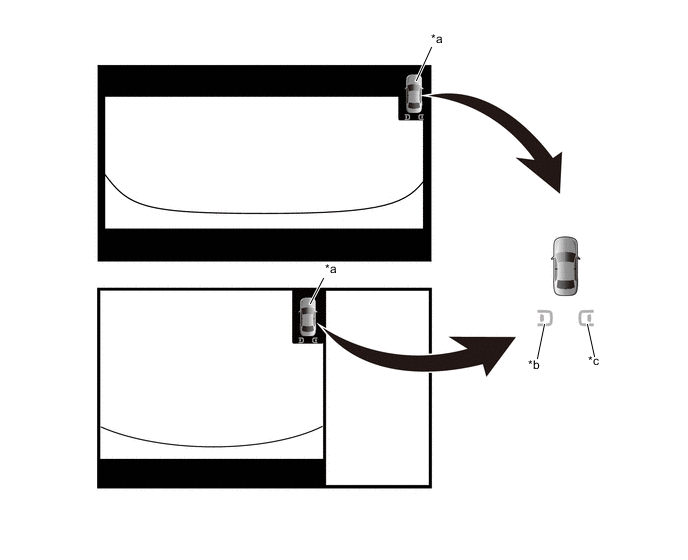
Другой автомобиль попадает в область обнаружения данного автомобиля вследствие перестроения.
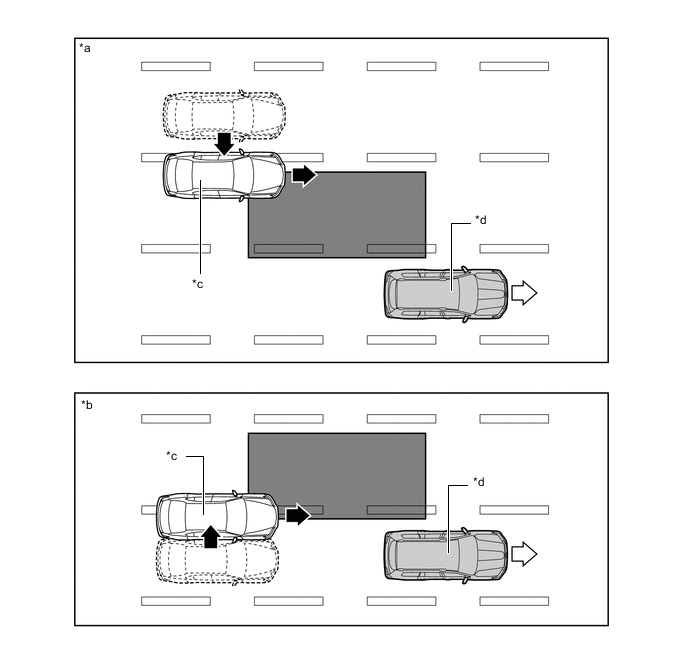
*a Другой автомобиль попадает в область обнаружения во время перестроения (присоединение) (тип 1). *b Другой автомобиль попадает в область обнаружения во время перестроения (присоединение) (тип 2). *c Другой автомобиль *d Данный автомобиль Направление перемещения другого автомобиля Направление перемещения данного автомобиля Зона обнаружения - -
-
-
Область обнаружения (для быстро приближающегося сзади автомобиля)
-
Другой автомобиль быстро приближается сзади.
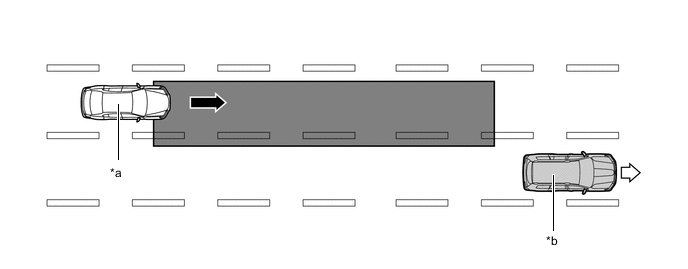
*a Другой автомобиль *b Данный автомобиль Скорость автомобиля (высокая) Скорость автомобиля (низкая) Зона обнаружения - - -
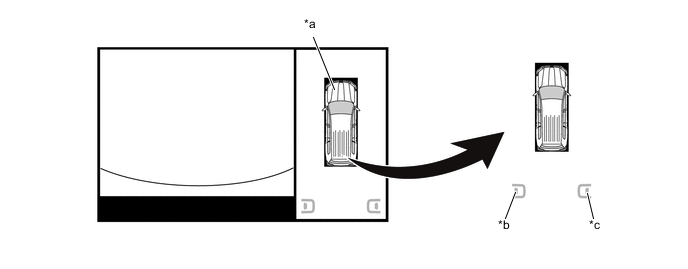
Другой автомобиль попадает в область обнаружения управляемого автомобиля из-за смены ряда движения и приближается к последнему.
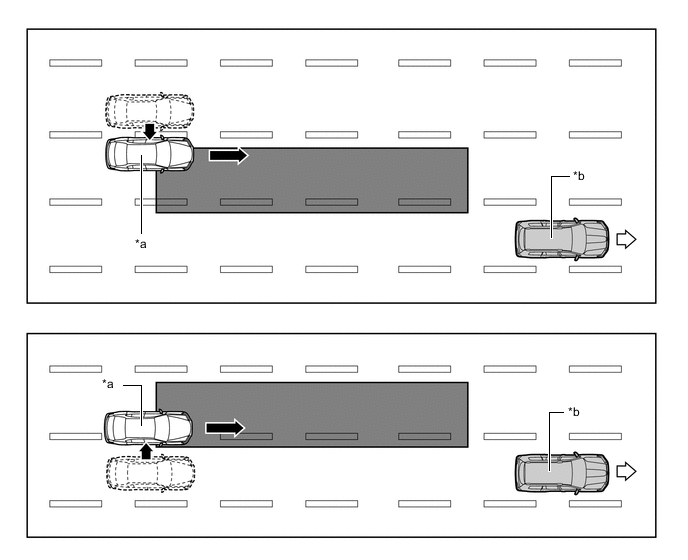
*a Другой автомобиль *b Данный автомобиль Направление перемещения другого автомобиля Направление перемещения данного автомобиля Зона обнаружения - -
-
-
В соответствии с условиями работы функция контроля слепых зон побуждает водителя убедиться в безопасности, информируя его с помощью контрольной лампы наружного зеркала заднего вида о том, что система обнаружила автомобили, которые находятся в слепой зоне управляемого автомобиля или быстро приближаются к ней.
-
Контрольная лампа наружного зеркала заднего вида загорается, когда какой-либо автомобиль попадает в слепую зону управляемого автомобиля или быстро приближается к ней, и переключатель указателей поворота не приведен в действие. Контрольная лампа начинает мигать, когда какой-либо автомобиль попадает в слепую зону управляемого автомобиля или быстро приближается к ней, и переключатель указателей поворота приведен в действие.
-
-
Функция RCTA
-
Функция RCTA приводится в действие при выполнении обоих следующих условий:
-
Главный выключатель системы контроля слепых зон включен.
-
Выключатель системы RCTA включен.
-
Рычаг переключения передач установлен в положение R.
-
Скорость управляемого автомобиля ниже примерно 8 км/час (5 миль в час).
-
Скорость целевого автомобиля находится в диапазоне примерно 8-28 км/час (5-18 миль в час).
-
-
Функция RCTA способна обнаруживать автомобили в своих областях обнаружения.
-
Эта система непрерывно измеряет относительную скорость приближающегося автомобиля и расстояние до него. Когда определяется, что приближающийся автомобиль пересекает траекторию движения данного автомобиля, вычисляется ориентировочное время пересечения (ECT). Если ECT составляет 2,5 с или меньше, система предупреждает об этом водителя водителя, заставляя мигать контрольные лампы наружных зеркал заднего вида, включая индикатор на вспомогательном индикаторе в сборе и включая зуммер RCTA (зуммер системы контроля слепых зон).
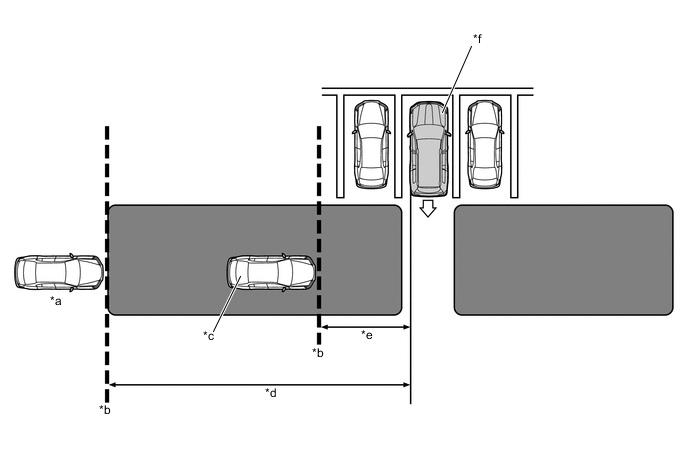
*a Целевой автомобиль (скорость примерно 28 км/час (18 миль в час)) *b Линия обнаружения цели *c Целевой автомобиль (скорость примерно 8 км/час (5 миль в час)) *d Приблизительно 20 м (66 футов) *e Приблизительно 5,5 м (18,0 фута) *f Данный автомобиль Зона предупреждения - -
-
-
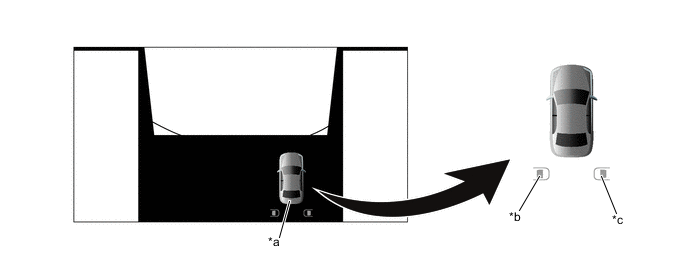
Нормальная парковка
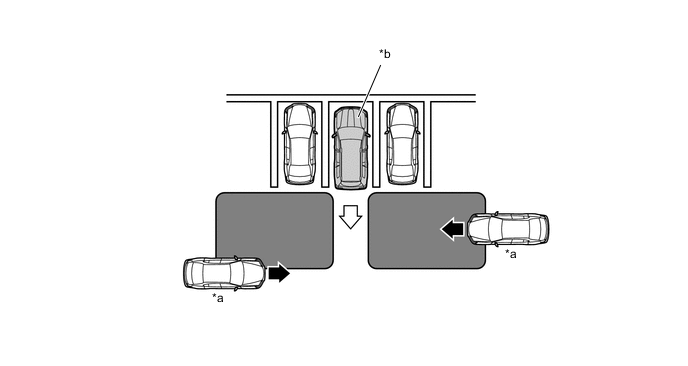
*a Отслеживаемый автомобиль *b Данный автомобиль Зона предупреждения - - -
В соответствии с условиями работы функция RCTA побуждает водителя убедиться в безопасности, информируя его с помощью контрольных ламп наружных зеркал заднего вида и зуммера RCTA (зуммера системы контроля слепых зон) о том, что другой автомобиль попал в область предупреждения датчика системы контроля слепых зон управляемого автомобиля.
-
Если во время движения управляемого автомобиля задним ходом другой автомобиль попадает в область обнаружения датчиков системы контроля слепых зон, и определяется, что этот автомобиль пересекает траекторию движения управляемого автомобиля, система предупреждает водителя о ситуации, заставляя мигать контрольные лампы наружных зеркал заднего вида и вспомогательного индикатора и включая зуммер RCTA (зуммер системы контроля слепых зон).
-
-
ВСПОМОГАТЕЛЬНЫЙ ИНДИКАТОР В СБОРЕ
-
Если в зоне обнаружения во время работы системы монитора типа местности обнаруживается приближающийся автомобиль, направление приближающегося автомобиля отображается на вспомогательном индикаторе в сборе.
Figure 1. Задний вид с широким углом обзора, боковой и задний виды (когда наружные зеркала заднего вида отведены)
*a Значок автомобиля *b Левая сторона *c Правая сторона - - Tech Tips
Этот рисунок приведен только для примера. Изображение может отличаться от реального экрана автомобиля.
Figure 2. Задний вид с широким углом обзора и двухсторонний боковой обзор
*a Значок автомобиля *b Левая сторона *c Правая сторона - - Tech Tips
Этот рисунок приведен только для примера. Изображение может отличаться от реального экрана автомобиля.
Figure 3. Панорамный обзор
*a Значок автомобиля *b Левая сторона *c Правая сторона - - Tech Tips
Этот рисунок приведен только для примера. Изображение может отличаться от реального экрана автомобиля.
-
Показанный ниже значок, отображаемый на многофункциональном дисплее, является предупреждением о неисправности системы.
Tech Tips
Этот рисунок приведен только для примера. Изображение может отличаться от реального экрана автомобиля.
-
С помощью вспомогательного индикатора в сборе пользователь может настраивать следующие параметры:
-
Яркость свечения индикатора наружного зеркала заднего вида
-
Момент обнаружения (4 ступени)
-
Громкость звукового сигнала зуммера
-
-
-
ДАТЧИК СИСТЕМЫ КОНТРОЛЯ СЛЕПЫХ ЗОН
-
Датчик системы контроля слепых зон содержит схему радара миллиметрового диапазона и схему обработки сигналов.
-
Датчик радара миллиметрового диапазона использует частоты диапазона 24 ГГц.
*a Приблизительно 70 м (230 футов) *b Приблизительно 150° *c Приблизительно 20° - - -
По информации, обеспечиваемой радаром миллиметрового диапазона, рассчитываются расстояние до объекта, азимут и относительная скорость, как рассмотрено ниже:
Позиция Метод расчета Расстояние Рассчитывается по времени, прошедшему с момента излучения волн радаром миллиметрового диапазона до момента приема отраженных волн. Дистанция составляет примерно 70 м (230 футов) Азимут Рассчитывается в зависимости от угла приема волн миллиметрового диапазона, излученных радаром. Угол обнаружения составляет примерно 150° по горизонтали и примерно 20°. Относительная скорость Рассчитывается по изменениям частот отраженных волн радара миллиметрового диапазона (вследствие эффекта Доплера*). *: Эффект Доплера заключается в том, что при приближении объекта к наблюдателю воспринимаемая частота излучаемых объектом радиоволн увеличивается, а при удалении – уменьшается. Этот эффект проявляется, так как когда объект находится далеко, принимаемые радиоволны имеют более высокую частоту по сравнению с частотой источника излучения. Для подтверждения диаграммы направленности радара применяется SST. Более подробную информацию см. в Руководстве по ремонту.
-