СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ОБ УХОДЕ С ПОЛОСЫ
-
УСЛОВИЯ РАБОТЫ
Условия работы системы LDA Операция Условие Включение / возобновление работы Функция предупреждения об уходе с полосы включается, когда выполняются все следующие условия:
-
Главный выключатель LDA включен. (Когда главный выключатель LDA нажимается для включения системы LDA, загорается контрольная лампа LDA.)
-
Скорость автомобиля приблизительно не ниже 50 км/час (32 мили в час).
-
Обнаружены разделительные линии.
-
Не получена команда сигнала поворота.
-
Неисправности системы не обнаружены.
Приостановка работы Работа системы предупреждения об уходе с полосы приостанавливается при выполнении любого из следующих условий:
-
Скорость автомобиля ниже приблизительно 50 км/час (32 миль в час) или более.
-
Получена команда сигнала поворота.
-
Разделительные линии не обнаружены.
-
Немедленно после подачи предупреждения об уходе с полосы.
-
В системе LDA обнаружена неисправность.
-
Температура передней камеры распознавания объектов отклоняется от нормы.
-
Автомобиль на половину ширины и более пересек разделительную линию.
Отмена Система предупреждения об уходе с полосы выключается при выполнении любого из следующих условий:
-
Главный выключатель LDA выключен.
-
Система LDA неисправна.
-
Зажигание выключается.
Работа системы предупреждения об уходе с полосы возобновляется при выполнении следующих условий:
-
Восстанавливаются условия запуска, перечисленные выше.
-
Система LDA возвращается в нормальный режим работы.
-
Зажигание выключается и снова включается (IG) для обеспечения нормальной работы после того, как система предупреждения об уходе с полосы была остановлена вследствие ее неисправности.
Режимы работы системы предупреждения об уходе с полосы (предупреждение о раскачивании автомобиля) Операция Условие Включение / возобновление работы Функция предупреждения об уходе с полосы включается, когда выполняются все следующие условия:
-
Функция предупреждения о раскачивании автомобиля включена с помощью настраиваемого параметра.
-
Скорость автомобиля приблизительно не ниже 50 км/час (32 мили в час).
-
Обнаружены разделительные линии.
-
Неисправности системы не обнаружены.
Приостановка работы Работа системы предупреждения об уходе с полосы приостанавливается при выполнении любого из следующих условий:
-
Скорость автомобиля ниже приблизительно 50 км/час (32 миль в час) или более.
-
Получена команда сигнала поворота.
-
Разделительные линии не обнаружены.
-
Немедленно после подачи предупреждения об уходе с полосы.
Отмена Система предупреждения об уходе с полосы выключается при выполнении любого из следующих условий:
-
Система LDA неисправна.
-
Выключатель зажигания выключен.
-
Функция предупреждения о раскачивании автомобиля выключена с помощью параметра настройки.
Работа системы предупреждения об уходе с полосы возобновляется при выполнении следующих условий:
-
Восстанавливаются условия запуска, перечисленные выше.
-
Система LDA возвращается в нормальный режим работы.
-
Зажигание выключается и снова включается (IG) для обеспечения нормальной работы после того, как система предупреждения об уходе с полосы была остановлена вследствие ее неисправности.
-
-
УПРАВЛЕНИЕ В СИСТЕМЕ
-
Обзор функции (функция предупреждения об уходе с полосы)
Если система определяет, что автомобиль может уйти с полосы, на которой находится, то она включает режим мигания разделительной полосы на мультиинформационном дисплее и включает зуммер или вибратор рулевого колеса, чтобы водитель мог принять меры и избежать ухода с полосы.
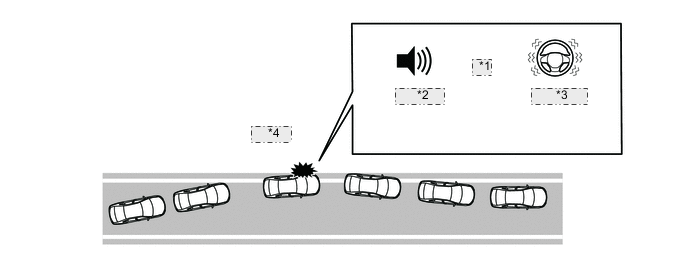
*1 или *2 Звучит зуммер *3 Рулевое колесо вибрирует *4 Предупреждение -
Обзор функции (функция предупреждения о раскачивании автомобиля)
Система определяет поперечное смещение автомобиля в пределах полосы движения, на которой он находится (что часто является результатом того, что водитель устал, отвлекся или не смотрит вперед), исходя из положения автомобиля на полосе движения и действий водителя рулем, и уведомляет водителя перед уходом с полосы или столкновением.
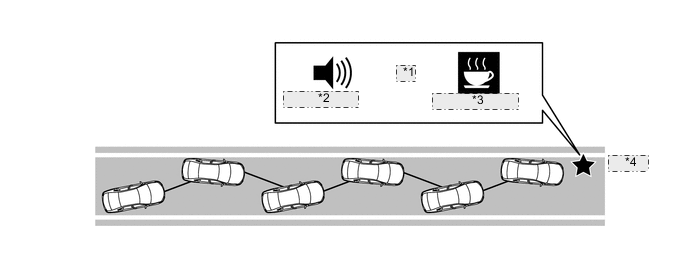
*1 и *2 Звучит зуммер *3 Дисплей предупреждений *4 Предупреждение
-
-
ФУНКЦИИ
-
Переключатели на рулевом колесе
Параметры функций подруливания и функций предупреждения о неустойчивом движении можно настроить с помощью переключателей управления щитком приборов на переключателе на рулевом колесе.
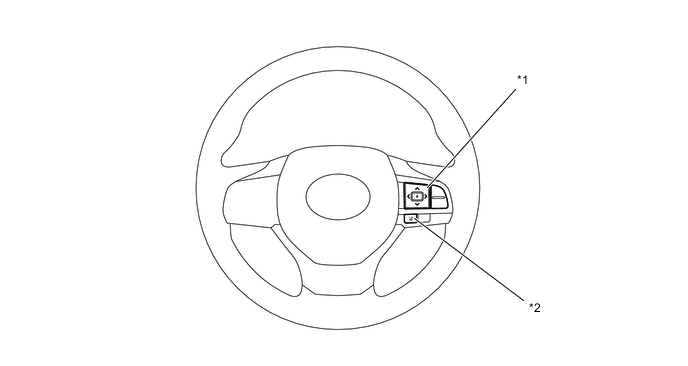
*1 Управляющие переключатели щитка приборов *2 Главный выключатель LDA Настройка функций предупреждения об уходе с полосы Параметр (выбирается с помощью кнопки "Вверх/вниз" переключателя управления щитком приборов) Описание Настройка (выбирается с помощью центральной кнопки переключателя управления щитком приборов) Warning Sensitivity (чувствительность при выдаче предупреждения) Момент включения предупреждений об уходе с полосы
-
Нормальное состояние
-
Высокое
Предупреждающее устройство Устройство, выдающее предупреждение об уходе с полосы
-
Зуммер (предупреждение)
-
Steering Vibration (вибрация рулевого управления)
Настройка функций предупреждения о раскачивании автомобиля Параметр (выбирается с помощью кнопки "Вверх/вниз" переключателя управления щитком приборов) Описание Настройка (выбирается с помощью центральной кнопки переключателя управления щитком приборов) Vehicle Sway Warning (предупреждение о раскачивании автомобиля) Функция предупреждения о раскачивании автомобиля
-
Вкл
-
OFF (ВЫКЛ)
Warning Sensitivity (чувствительность при выдаче предупреждения) Чувствительность предупреждения о раскачивании автомобиля
-
Высокое
-
Номинальная
-
Низкое
-
-
Передняя камера распознавания объектов
-
Передняя камера распознавания объектов получает изображение дороги на расстоянии приблизительно до 50 м (164 фута) перед собой.
-
Передняя камера распознавания объектов определяет разделительные линии и рассчитывает радиус изгиба осевой линии полосы, угол отклонения от курса, боковое отклонение от центра полосы, а также ширину полосы.
Tech Tips
Угол установки передней камеры распознавания объектов необходимо отрегулировать после выполнения любой из указанных ниже операций. Более подробную информацию см. в Руководстве по ремонту.
-
Передняя камера распознавания объектов снята и установлена, либо заменена.
-
Регулировка или замена деталей, связанных с шинами или подвеской.
-
К передней камере распознавания объектов приложено большое усилие.
-
-
Функция предупреждения об уходе с полосы не включается, если автомобиль просто приближается к линии разметки (но не пересекает ее), пока автомобиль движется параллельно линии разметки.
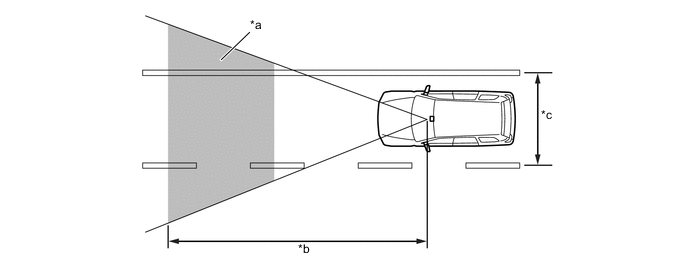
*a Зона обработки изображения *b Приблизительно 50 м (164 фута) *c Передняя камера распознавания объектов регистрирует изображения объектов, находящихся на расстоянии не менее 3,0 м (9,8 фута). - - Figure 1. Данные для расчетов, выполняемых передней камерой распознавания объектов
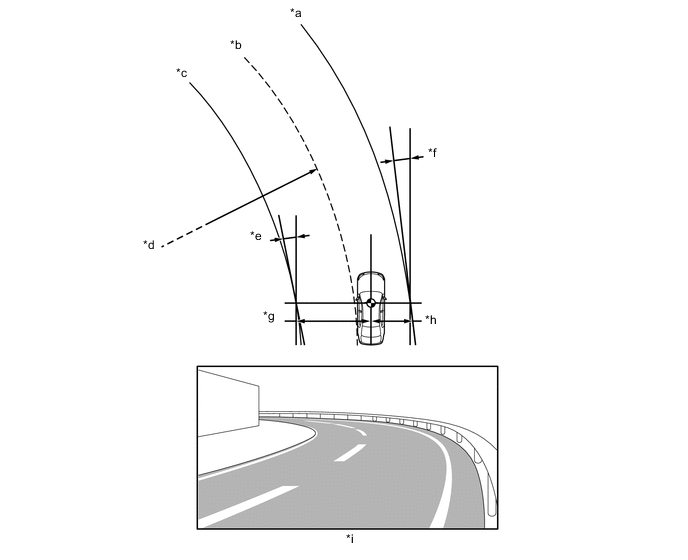
*a Правая разделительная линия *b Центр полосы движения *c Левая разделительная линия *d Радиус полосы (если обнаружена только левая или только правая разделительная линия, вычисляется радиус обнаруженной разделительной линии). *e Угол между направлением движения автомобиля и левой разделительной линией. *f Угол между направлением движения автомобиля и правой разделительной полосой. *g Расстояние от автомобиля до левой разделительной линии. *h Расстояние от автомобиля до правой разделительной линии. *i Изображение, получаемое передней камерой распознавания объектов - -
-
-