ПРЕДАВАРИЙНАЯ СИСТЕМА БЕЗОПАСНОСТИ (для моделей с камерой контроля водителя)
-
ОПИСАНИЕ
-
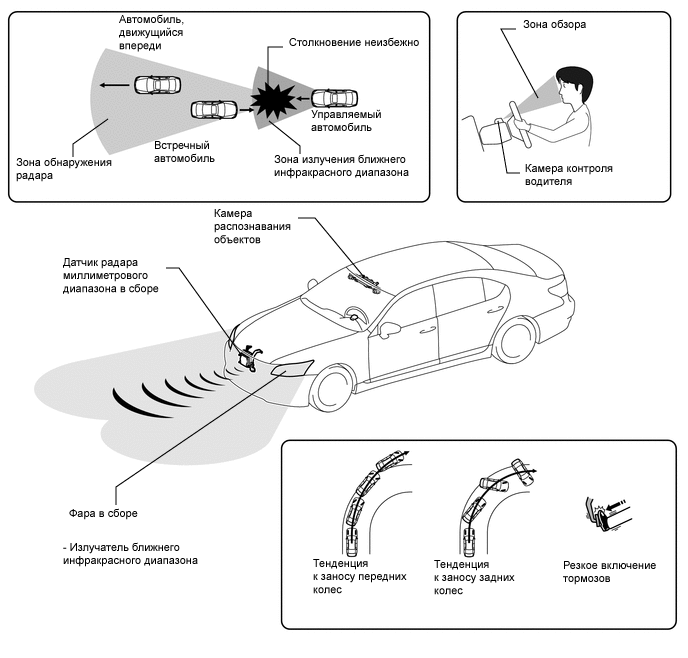
Предаварийная система безопасности (радарного типа с камерой распознавания объектов и камерой контроля водителя) убирает слабину передних ремней безопасности, а также предупреждает водителя звуковым сигналом зуммера и сообщением на мультиинформационном дисплее. Затем система переводит систему управления тормозами в режим усилителя экстренного торможения предаварийной системы и включает тормоза предаварийной системы, когда перед столкновением выполняется любое из условий, указанных ниже. Это позволяет уменьшить травмы водителя и переднего пассажира.
Условия работы
-
Определено, что высока вероятность столкновения с препятствием или автомобилем впереди.
-
При резком включении тормозов.
-
Передние колеса сцепляются с дорожным покрытием слабее, чем задние (передние колеса могут проскальзывать).
-
Задние колеса сцепляются с дорожным покрытием слабее, чем передние (задние колеса могут проскальзывать).
-
ЭБУ контроля водителя определяет по видеосигналам от камеры контроля водителя, что водитель не смотрит вперед, или его веки не открыты.
-
Датчик радара миллиметрового диапазона, камера распознавания объектов и ЭБУ помощи при движении определяют, является ли столкновение с препятствием или автомобилем впереди неизбежным.
-
ЭБУ помощи при движении добавляет к информации от датчика радара миллиметрового диапазона данные о трехмерном объекте впереди автомобиля (эти данные передает ЭБУ распознавания объектов на основании сигналов изображения, поступающих от камеры распознавания объектов). Таким образом, система может заблаговременно определять вероятность столкновения со встречным автомобилем или приближающимся объектом.
-
ЭБУ контроля водителя определяет направление, в котором смотрит водитель, и ширину, на которую открыты его глаза, по видеоизображению лица водителя, получаемому с камеры контроля водителя. ЭБУ контроля водителя определяет, что водитель не смотрит вперед, или его веки не открыты. После этого ЭБУ помощи при движении предупреждает водителя, применяя предупредительное торможение*.
-
*: Когда объектом, определенным как представляющий вероятность столкновения, является впереди движущийся автомобиль, и водитель не смотрит вперед или не открывает глаза после звукового сигнала зуммера.
-
-
Камера распознавания объектов и камера контроля водителя обеспечивают регистрацию излучения ближнего инфракрасного диапазона. Они способны передавать изображение даже ночью, так как работают совместно с излучателями ближнего инфракрасного диапазона. Излучатель ближнего инфракрасного диапазона для камеры распознавания объектов установлен в фаре. Камера контроля водителя имеет встроенные светодиоды ближнего инфракрасного диапазона.
-
ЭБУ системы противоскольжения регистрирует экстренное торможение, а также проскальзывание (занос) передних и задних колес.
-
-
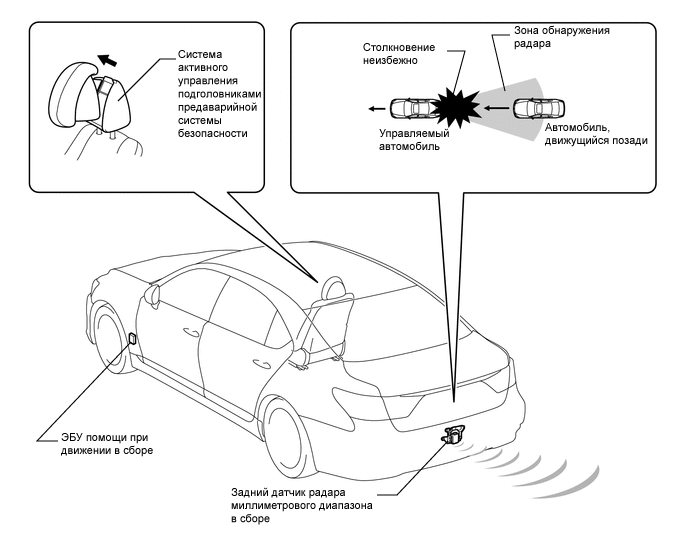
Когда выполняются указанные ниже условия, для подготовки к столкновению с движущимся сзади автомобилем интеллектуальные подголовники предаварийной системы безопасности сидений водителя и переднего пассажира перемещаются в такие положения, в которых расстояние между ними и головами водителя и пассажира будет минимально. Это позволяет минимизировать травмы шеи пассажиров.
Условия работы
-
ЭБУ помощи при движении определил, что вероятность столкновения с движущимся сзади автомобилем высока.
-
ЭБУ помощи при движении определил, что вероятность столкновения с движущимся сзади автомобилем еще выше, чем в предыдущем случае.
-
Вероятность столкновения сзади определяют задний датчик радара миллиметрового диапазона и ЭБУ помощи при движении. Вычисления основаны на относительной скорости и расстоянии между управляемым автомобилем и автомобилем, приближающимся сзади.
-
-
-
МЕРЫ ПРЕДОСТОРОЖНОСТИ
-
Когда в описанных ниже условиях датчик радара миллиметрового диапазона или камера распознавания объектов обнаруживает объект впереди, ЭБУ помощи при движении может принять решение о неизбежности столкновения и привести в действие предаварийную систему безопасности. Тем не менее, это не является признаком неисправности.
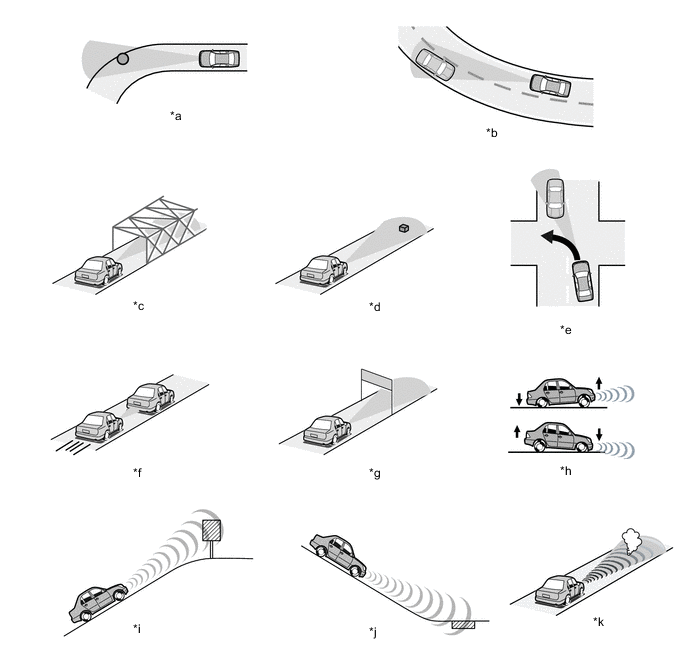
Обозначения на рисунке *a Объект рядом с наружным краем закругления дороги (дорожное ограждение, уличный фонарь, дорожный знак) *b Встречный автомобиль при прохождении поворота *c Узкий металлический мост *d Металлический объект, стальная плита или бугор на поверхности дороги *e Встречный транспортный поток на перекрестке *f Быстро приближается автомобиль впереди *g Проезд через шлагбаум *h Существенное изменение высоты подвески автомобиля (подъем или опускание передней части автомобиля) *i Металлический предмет, например, дорожный знак, перед автомобилем на подъеме *j Металлический предмет или стальная плита в грунте у основания склона *k Дым или пар - - Обнаружение может оказаться невозможным при следующих условиях:
-
Про проезде мимо дорожных знаков, рекламных щитов и эстакад.
-
При проезде перекрестка.
-
Движение по ухабистой дороге.
-
Смещение оси датчика радара миллиметрового диапазона в сборе.
-
-
Датчик радара миллиметрового диапазона может быть неспособен произвести обнаружение в следующем случае:
-
Произошло столкновение с объектом, находящимся вне зоны обнаружения.
-
-
Датчик радара миллиметрового диапазона может не воспринимать в качестве объектов столкновения следующие объекты:
Объекты, которые не обнаруживаются Пластмассовые конструкции (сигнальные конусы и т.п.). Объекты, которые не обнаруживаются в неподвижном состоянии Люди, велосипеды, мотоциклы, деревья, животные, снегоудерживающие ограждения и т.д. -
В следующих условиях обнаружение объектов может быть затруднено или невозможно:
-
В крутом повороте или на ухабистой дороге.
-
Когда направление движения автомобиля прерывается.
-
В плохую погоду (в дождь, туман, снег, песчаные бурю и т.д.).
-
При значительном изменении высоты подвески автомобиля (например, если его передняя часть наклоняется вперед или назад).
-
Когда ось датчика радара миллиметрового диапазона смещена.
-
Если автомобиль движется с боковым скольжением при отключенной системе VSC.
-
-
Камера распознавания объектов может не обнаруживать объекты перед автомобилем в следующих условиях:
Погодные условия Неблагоприятные погодные условия, такие как сильный дождь, туман или снегопад (условия ограниченной видимости) Чрезвычайно жаркая погода (если автомобиль припаркован в таких условиях, камера нагревается) Условия освещения Источник освещения светит непосредственно в камеру. -
Камера контроля водителя может не определять положение лица водителя или век в следующих условиях:
Между лицом водителя и камерой контроля водителя находится экранирующий предмет. Перед камерой контроля водителя находится какой-либо предмет и т.п. Часть лица водителя скрыта. Прическа, очки, руки, солнцезащитные очки, шляпа, маска и т.д. Пыль или грязь перед камерой контроля водителя. Окружающее освещение Тени, создаваемые светом, который падает в горизонтальном или диагональном направлении, или прямой солнечный свет, направленный прямо на водителя или в камеру контроля водителя. Поза водителя Водитель находится вне зоны обзора камеры контроля водителя. -
Когда в описанных ниже условиях задний датчик радара миллиметрового диапазона обнаруживает объект сзади, ЭБУ помощи при движении может принять решение о неизбежности столкновения и привести в действие предаварийную систему безопасности. Тем не менее, это не является признаком неисправности.
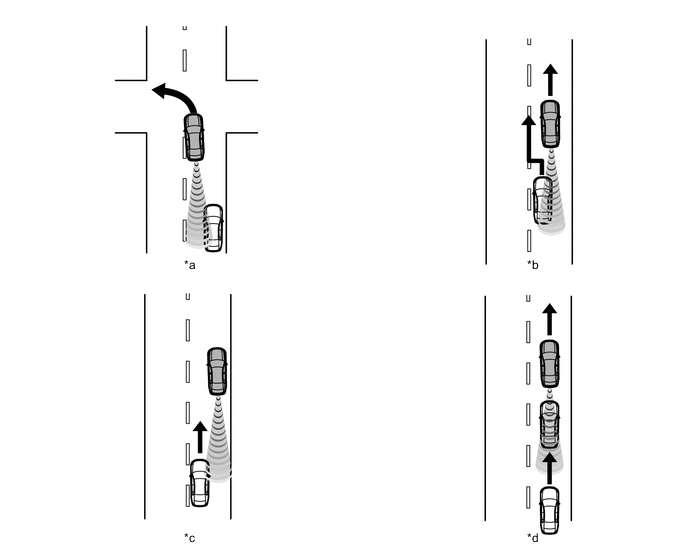
Обозначения на рисунке *a Автомобиль, обгоняющий управляемый автомобиль, который стоит в центре перекрестка для поворота налево *b Автомобиль, обгоняющий управляемый автомобиль, который движется прямо *c Автомобиль, обгоняющий управляемый автомобиль, остановленный на обочине *d Автомобиль, приближающийся сзади на высокой скорости, когда управляемый водителем автомобиль движется или остановлен -
Задний датчик радара миллиметрового диапазона может не воспринимать в качестве объектов столкновения следующие объекты:
Объекты, которые не обнаруживаются в неподвижном состоянии Мотоциклы и т.д.
-