PRE-CRASH SAFETY SYSTEM(w/ Driver Monitor Camera)
-
OUTLINE
-
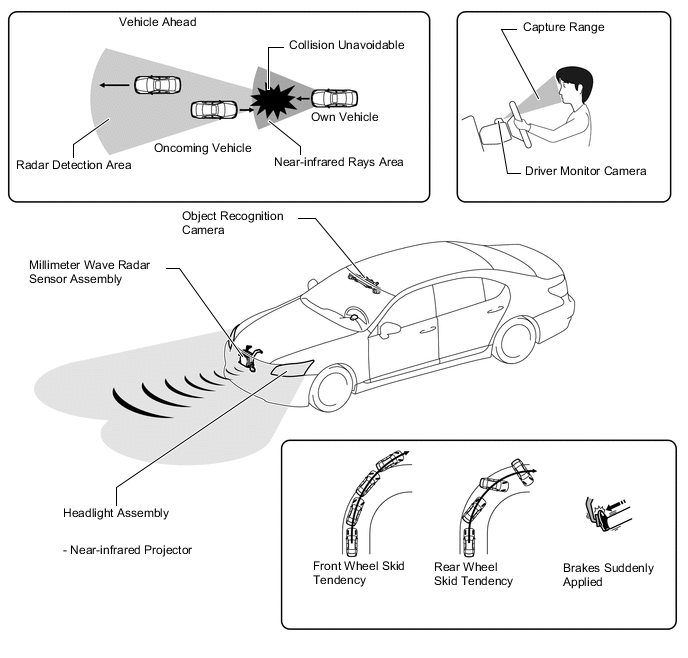
The pre-crash safety system (radar type with object recognition camera and driver monitor camera) retracts the slack in the front seatbelts and warns the driver by sounding a buzzer and indicating a warning on the multi-information display. Then, the system sets the brake control system in the pre-crash brake assist and applies the pre-crash brake when any of the conditions indicated below are present before a collision. This lessens the injury sustained by the driver and front passenger.
Operating Conditions
-
When there is a high probability of a collision with an obstacle in front of the vehicle or a collision with the vehicle ahead.
-
When the brakes are suddenly applied.
-
When the front wheels lose grip in relation to the rear wheels (front wheel skid tendency).
-
When the rear wheels lose grip in relation to the front wheels (rear wheel skid tendency).
-
When the driver monitor ECU assembly determines that the driver is not facing forward or eyelids are not open based on the image data provided by the driver monitor camera.
-
The millimeter wave radar sensor assembly, object recognition camera and driving support ECU assembly determine whether a collision with an obstacle in front of the vehicle or a collision with the vehicle ahead is unavoidable.
-
The driving support ECU assembly adds information on the three-dimensional object in front of the vehicle (which the object recognition ECU has detected based on the image information provided by the object recognition camera) to the forward information detected by the millimeter wave radar sensor assembly. Thus, the system can determine the possibility of a collision with an oncoming vehicle or an approaching object at an early stage.
-
The driver monitor ECU assembly monitors the direction of the driver's face and the width of the driver's eyelids based on the image data of the driver's face captured by the driver monitor camera. The driver monitor ECU assembly determines the driver is not facing forward or eyelids are not open. Then, the driving support ECU assembly warns the driver by applying a warning brake*.
-
*: When the object targeted as a potential collision is the vehicle ahead, and the driver does not face forward or open their eyes after the buzzer has sounded.
-
-
Both the object recognition camera and the driver monitor camera support near-infrared photography. Working together with near-infrared projectors, they can capture image data even at night. The near-infrared projector for the object recognition camera is provided in the headlight assembly. The driver monitor camera has built-in near-infrared LEDs.
-
The skid control ECU assembly determines emergency braking and front or rear wheel skid tendency.
-
-
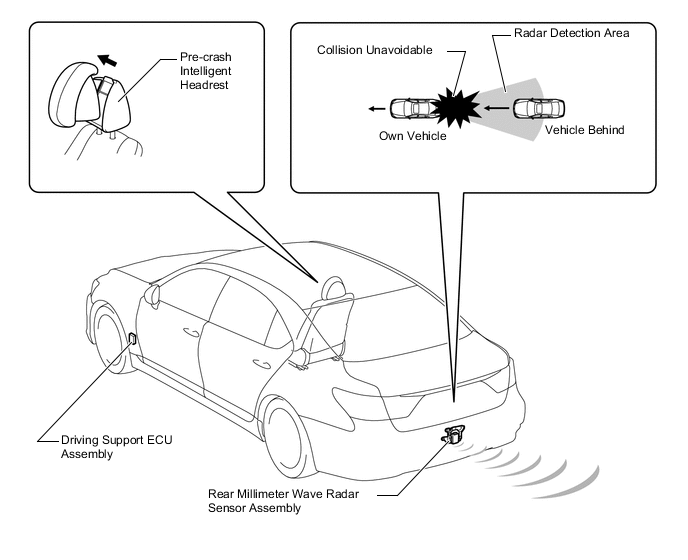
When the conditions indicated below exist, in preparation for a rear-end collision, the pre-crash intelligent headrests for the driver and front passenger move to a position that shortens the distance between the occupants' heads and the headrests. This lessens the neck injury sustained by the occupants.
Operating Conditions
-
The driving support ECU assembly has determined that the possibility of the driven vehicle being rear-ended by another vehicle is high.
-
The driving support ECU assembly has determined that the possibility of the driven vehicle being rear-ended by another vehicle is even higher.
-
The rear millimeter wave radar sensor assembly and the driving support ECU assembly determine the possibility of being rear-ended. This is based on the relative speed and distance between the driven vehicle and the vehicle approaching from behind.
-
-
-
PRECAUTION
-
When the millimeter wave radar sensor assembly or object recognition camera detects an object in front under the conditions described below, the driving support ECU assembly may determine that a collision is unavoidable, and operate the pre-crash safety system. However, this is not abnormal.
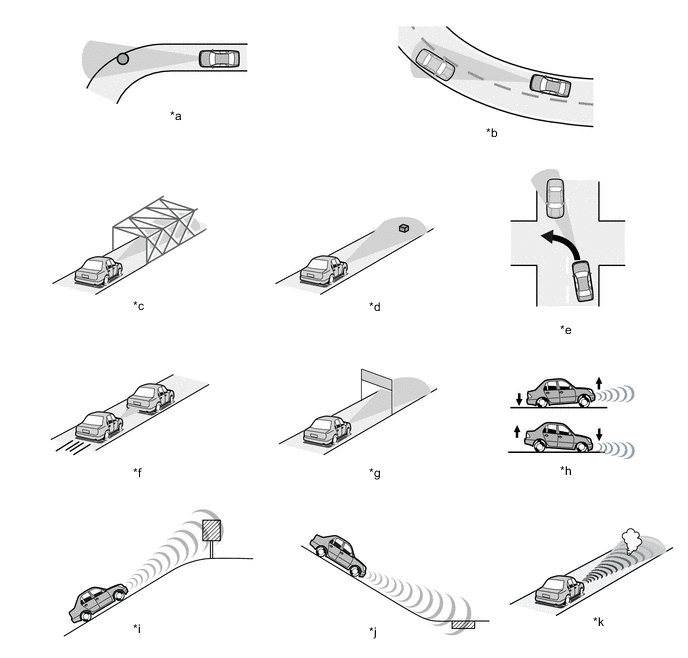
Text in Illustration *a Object on road surface at corner entrance (guard rail, street light, sign, signboard) *b Opposing traffic vehicle while cornering *c Narrow iron bridge *d Metal object, steel plate, or bump on road surface *e Opposing traffic at intersection *f When vehicle ahead is approached suddenly *g When passing through toll gate *h Vehicle height change significantly (front of vehicle inclined either upward or downward) *i Metal object such as sign board in front of vehicle on uphill slope *j Metal object or steel plate in ground at base of downhill slope *k Smoke or vapor - - Detection may also not be possible under the following conditions:
-
When passing road signs, billboards and overpasses.
-
When passing through an intersection.
-
When driving on a bumpy road.
-
When the axis of the millimeter wave radar sensor assembly is displaced.
-
-
The millimeter wave radar sensor assembly may not be able to perform detection in the following case:
-
A collision has occurred with an object outside the detection area.
-
-
The millimeter wave radar sensor assembly might not be able to detect the following objects as collision objects:
Objects that cannot be detected Plastic items (safety cones, etc.), etc. Objects that cannot be detected in a stable manner People, bicycles, motorcycles, trees, animals, snow fence, etc. -
The following conditions make object detection difficult or impossible:
-
When there is a sharp corner or bumpy road.
-
When the vehicle's direction of travel is interrupted.
-
When in poor weather (such as rain, fog, snow, sandstorms and so on).
-
When the vehicle height changes significantly (for example, the front of vehicle is inclined either upward or downward).
-
When the axis of the millimeter wave radar sensor assembly is displaced.
-
If the vehicle is sideslipping when the VSC is not activated.
-
-
The object recognition camera might not be able to detect objects in front of the vehicle under the following conditions:
Weather conditions Adverse weather such as heavy rain, fog or snowstorm (low visibility conditions) Extremely hot weather (the camera heating up due to the vehicle being parked in such weather) Light conditions Light shining directly into the camera -
The driver monitor camera may not be able to detect the face or eyelids of the driver under the following conditions:
A shielding object is placed between the driver monitor camera and the driver's face. An object is placed in front of the driver monitor camera, etc. A portion of the driver's face is hidden. Hair style, eyeglasses, hands, sunglasses, hat, mask, etc. Dust or grime in front of the driver monitor camera Light environment Shadow created by light coming in from the horizontal or diagonal direction, or direct sunlight on the driver or driver monitor camera Driving posture The driver is not within the capture range of the driver monitor camera. -
When the rear millimeter wave radar sensor assembly detects an object in the rear under the conditions described below, the driving support ECU assembly may determine that a collision is unavoidable and operate the pre-crash safety system. However, this is not abnormal.
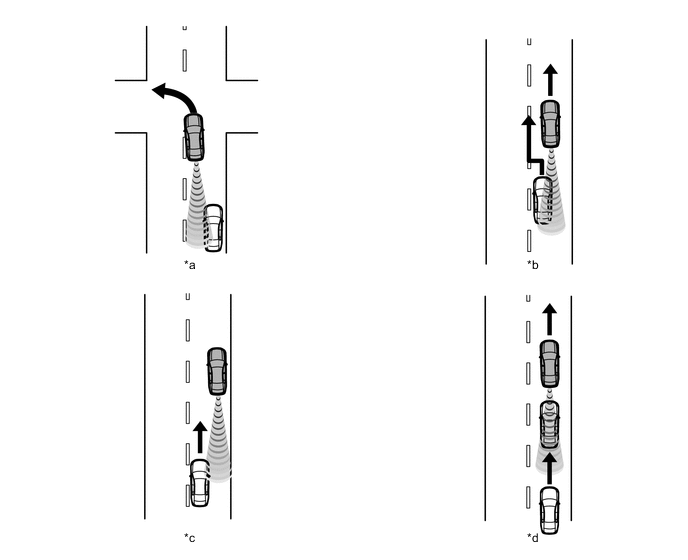
Text in Illustration *a A vehicle that overtakes the driver's vehicle when the driver's vehicle stops in the middle of an intersection to turn left *b A vehicle that overtakes the driver's vehicle when the driver's vehicle is being driven straight ahead *c A vehicle that overtakes the driver's vehicle when the driver's vehicle is stopped on the side of the road *d A vehicle that approaches from behind at high speeds when the driver's vehicle is being driven or stopped -
The rear millimeter wave radar sensor assembly might not be able to detect the following objects as collision objects:
Objects that cannot be detected in a stable manner Motorcycles, etc.
-