PRE-COLLISION SYSTEM GENERAL
-
OUTLINE
-
Pre-collision System (PCS)
-
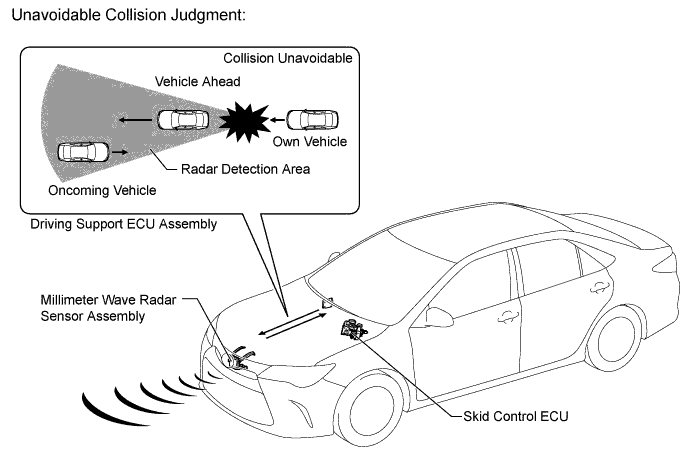
The pre-collision system detects the possible collision of the vehicle with an obstacle, such as a vehicle ahead, based on information received from various sensors. The pre-collision system lessens the damage sustained in a collision by operating in unison with other systems. As part of this, the systems that dampen the impact of a collision, such as the brake control system, are operated.
-
This system uses a millimeter wave radar sensor assembly to detect a possible collision with a vehicle or obstacle in front. It performs brake assist control and brake control.
-
Due to the achievement of significant deceleration performance of the pre-collision brake and pre-collision brake assist, a collision may be avoided altogether or collision damage can be reduced. Maximum vehicle deceleration is approximately 30 km/h (19 mph)* for pre-collision brake and approximately 60 km/h* (37 mph)* for pre-collision brake assist.
*: It may be possible that sufficient deceleration performance cannot be obtained due to factors such as road and weather conditions.
-
-
-
MAJOR DIFFERENCE
-
The 2015 models have been modified from the 2014 models as shown below:
-
A pre-collision system has been newly adopted.
-
-
-
PRECAUTION
-
When the millimeter wave radar sensor assembly detects an object in front of the vehicle under the following conditions, the driving support ECU assembly may determine that the possibility of a collision is high or a collision is unavoidable, and operates the pre-collision system. This does not indicate a malfunction.
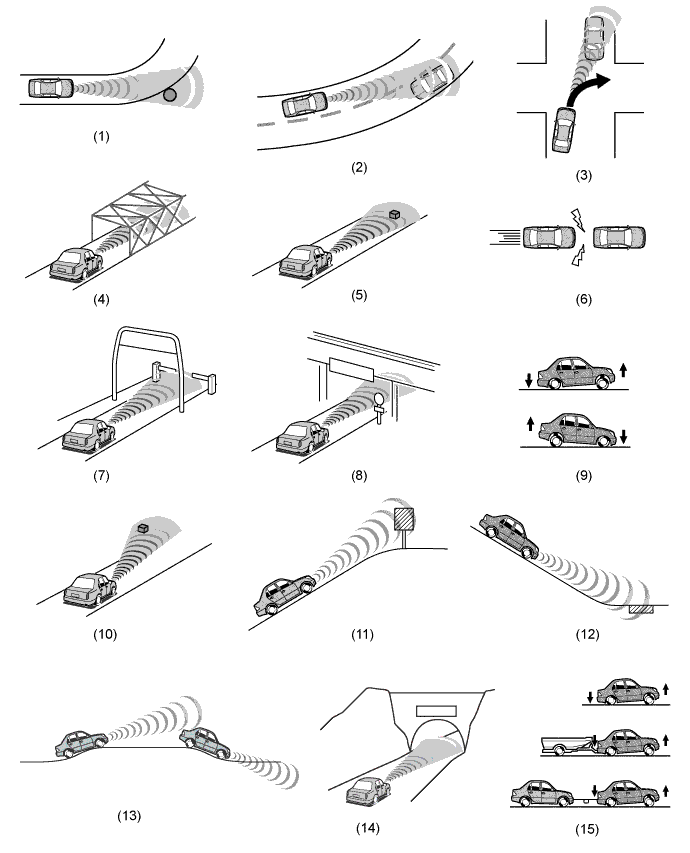
Number Condition (1) Object near outer edge of a curved road (guard rail, street light or sign) (2) Oncoming traffic on a curved road (3) Opposing traffic at an intersection (4) Narrow iron bridge (5) Metal object, steel plate on the road (6) Rapid approach to a preceding vehicle (7) Toll gate (8) Overpass or sign over the road (9) Vehicle height changes significantly (front of vehicle inclined either upward or downward) (10) Millimeter wave radar sensor assembly is misaligned (such as after reinstallation or after a collision) (11) Metal object such as a sign in front of the vehicle on an uphill slope (12) Metal object or steel plate in the ground at the base of a downhill slope (13) Bump on the road (14) When passing through a tunnel (15) When the front of the vehicle is pointing upward (due to towing a trailer or emergency towing, carry a heavy load in the luggage compartment, etc.) -
Conditions in which the millimeter wave radar sensor assembly does not detect an object:
-
The vehicle collides with an object located outside the detection area of the millimeter wave radar sensor assembly (+/- 10°), such as in a side collision, rear collision, etc.
-
-
The millimeter wave radar sensor assembly might not be able to detect the following objects as collision objects:
Objects that cannot be detected Plastic items (safety cones, etc.) Objects that cannot be detected in a stable manner People, bicycles, motorcycles, trees, animals, snow, fences, etc. -
Conditions in which detection performance deteriorates:
-
On a tight curve or bumpy road
-
Something or someone suddenly enters the path of the vehicle at a place such as an intersection
-
Another vehicle suddenly cuts in the direction of travel of the driver's vehicle
-
In severe weather such as heavy rain, fog, snow or a sand storm
-
Vehicle is skidding sideways while VSC is not operating
-
Vehicle height changes significantly (front of vehicle inclined either upward or downward)
-
Millimeter wave radar sensor assembly is misaligned (such as after reinstallation or after a collision)
-
When the vehicle is turning sharply and something or someone suddenly appears in the path of the vehicle
-
-