TOYOTA PARKING ASSIST-SENSOR SYSTEM
-
DESCRIPTION
-
A Toyota parking assist-sensor system is used, depending on the model.
-
The Toyota parking assist-sensor system uses ultrasonic sensors to detect any obstacles at the corners, or the rear of the vehicle.
-
The Toyota parking assist-sensor system then informs the driver of the approximate distance between the sensors and the obstacles as well as their positions by displaying them on the multi-information display in the combination meter or the multi-display* and by sounding a clearance warning buzzer.
-
The Toyota parking assist-sensor system is controlled by the clearance warning ECU.
-
The operating condition of each Toyota parking assist-sensor system differs according to its installed position as shown in the table below:
*: Optional Equipment
Installation Position Operating Condition Ultrasonic Sensor (Front Corner LH and RH)
-
Power source is IG-ON.
-
Shift position is in any position other than P.
-
Vehicle speed is approximately 10km/h (6 mph) or less. The sensor stops operating when the vehicle speed is 13 km/h (8 mph) or more, and starts operating when the vehicle speed decreases to below 9 km/h (5.6 mph).
-
Back sonar or clearance sonar switch is ON.
Ultrasonic Sensor (Rear Corner LH and RH)
Ultrasonic Sensor (Rear Center LH and RH)
-
Power source is IG-ON.
-
Shift position is R.
-
Back sonar or clearance sonar switch is ON.
-
-
-
DETECTION AREA
Figure 1. Corner Area
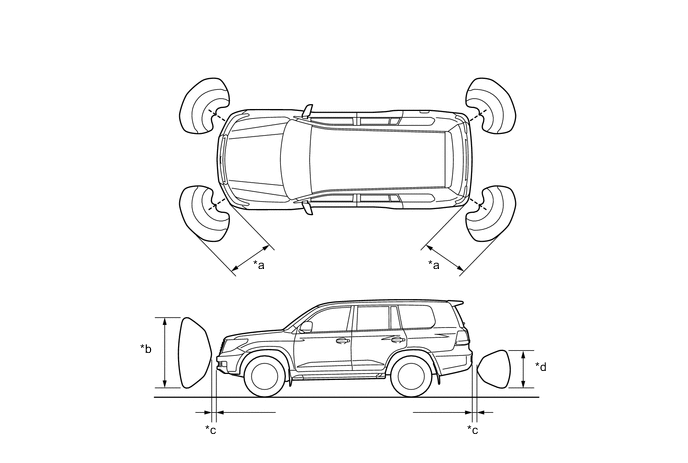
*a Approx.60cm (23.6 in.) *b Approx.75cm (30 in.) *c Approx.20cm (7.8 in.) *d Approx.40cm (15.8 in.) Figure 2. Rear Center Area
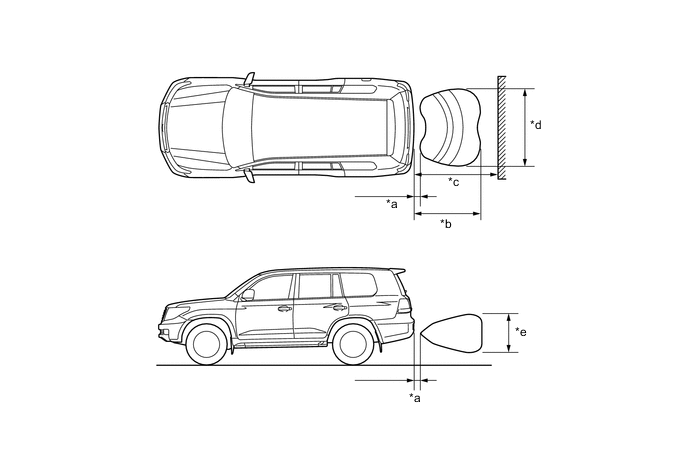
*a Approx.20cm (7.8 in.) *b Approx.100cm (39.4 in.) *c Approx.150cm (59 in.) *d Approx.170cm (67 in.) *e Approx.60cm (23.6 in.) - -
-
These detection ranges are applicable when positioning a 60mm (0.2ft.) diameter pole parallel or perpendicular to the ground. The ranges vary depending on the measuring method and type of obstacle.
-