СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ
-
КОНСТРУКЦИЯ
-
В автомобиле используются активные датчики частоты вращения, способные определять направление вращения колеса. Датчики этого типа содержат микросхему, которая включает в себя 2 магнитных резистивных элемента (MRE).
-
Магнитный ротор, сформированный из расположенных по кругу пар полюсов N и S, объединен с внутренним кольцом подшипника ступицы.
Figure 1. Передний мост
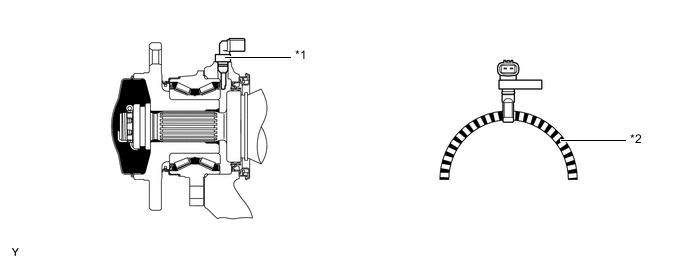
*1 Передний датчик частоты вращения *2 Ротор датчика Figure 2. Задний мост
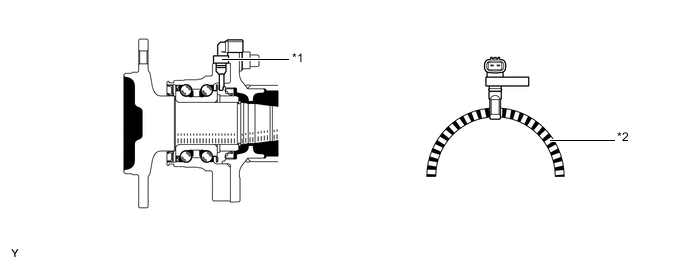
*1 Задний датчик частоты вращения *2 Ротор датчика
-
-
ПРИНЦИП РАБОТЫ
-
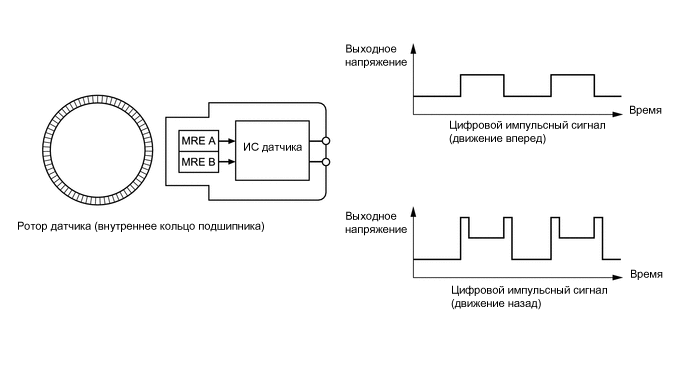
В активном датчике частоты вращения используется микросхема, регистрирующая изменения магнитного поля в результате вращения ротора датчика. При этом датчик передает данные измерений в ЭБУ системы противоскольжения в виде цифровых импульсов.
-
Для определения направления вращения анализируется соотношение между импульсами выходных сигналов, которые генерируют 2 магнитных резистивных элемента (MRE).
-
После получения данного сигнала микросхема датчика выдает сигнал переднего или заднего хода.
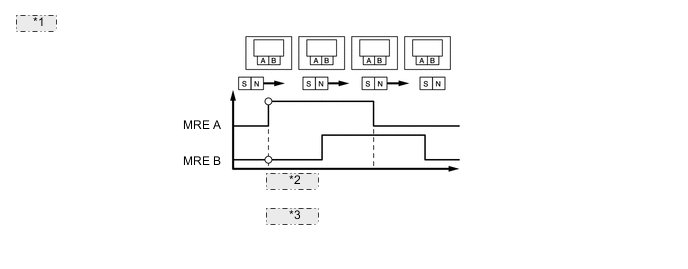
*1 Передняя передача *2 MRE A: Выс. *3 MRE B: Низ. 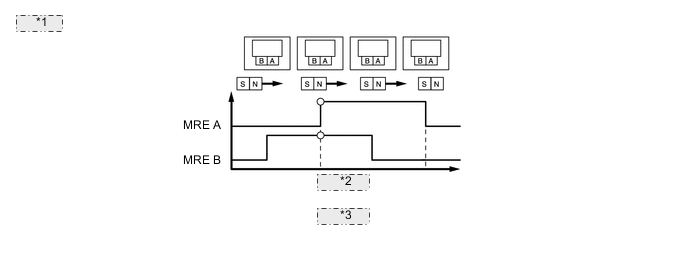
*1 Назад *2 MRE A: Выс. *3 MRE B: Выс. -
Скорость автомобиля определяется по частоте выходных импульсов. Поскольку активный датчик формирует цифровые импульсы, он может определять скорости автомобиля, близкие к 0 км/час.
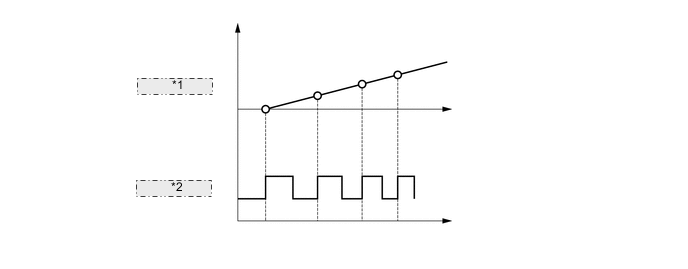
*1 Vehicle Speed *2 Выходной сигнал датчика
-