СИСТЕМА SFI
-
ПРИНЦИП РАБОТЫ
-
ECM определяет требуемый угол поворота дроссельной заслонки и управляет электродвигателем привода дроссельной заслонки в соответствии с рабочими условиями.
-
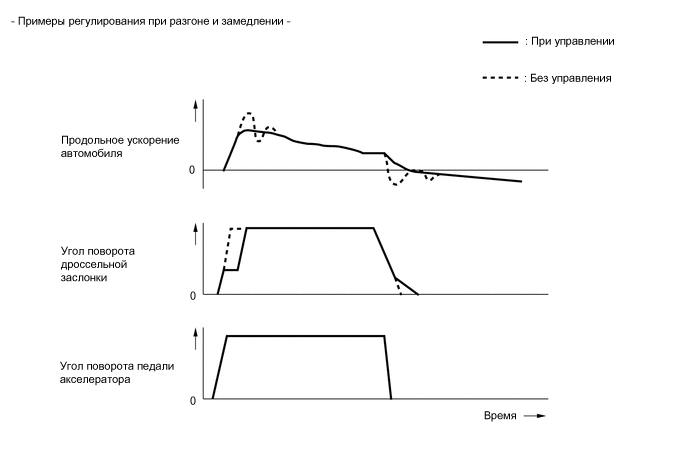
ECM устанавливает оптимальный угол поворота дроссельной заслонки в соответствии с режимом движения (то есть в зависимости от усилия на педали акселератора и частоты вращения коленчатого вала двигателя), обеспечивая высококачественное управление дроссельной заслонкой и комфорт во всех режимах работы двигателя.
-
ECM управляет дроссельной заслонкой с тем, чтобы постоянно поддерживалась оптимальная частота вращения холостого хода.
-
Угол поворота дроссельной заслонки, которая является частью антипробуксовочной системы (TRC), уменьшается по команде, переданной из ЭБУ системы противоскольжения в ECM. Эта команда передается при значительной пробуксовке ведущего колеса, что позволяет сохранить курсовую устойчивость автомобиля и надлежащее тяговое усилие на дороге.
-
Для максимально эффективной работы системы VSC угол поворота дроссельной заслонки регулируется путем координации управления ЭБУ системы противоскольжения и ECM.
-
ECM непосредственно управляет дроссельной заслонкой, поддерживая заданную скорость движения.
-
На моделях с динамической радарной системой круиз-контроля динамическая радарная система круиз-контроля посредством датчика радара миллиметрового диапазона и ЭБУ помощи при движении определяет расстояние до находящегося впереди автомобиля, его направление движения и относительную скорость. Это дает системе возможность управлять замедлением и разгоном, поддерживать скорость едущего впереди автомобиля, а также поддерживать постоянную скорость движения. Чтобы обеспечить выполнение этих функций, ECM управляет дроссельной заслонкой.
-