DYNAMIC RADAR CRUISE CONTROL SYSTEM
-
CONSTRUCTION
-
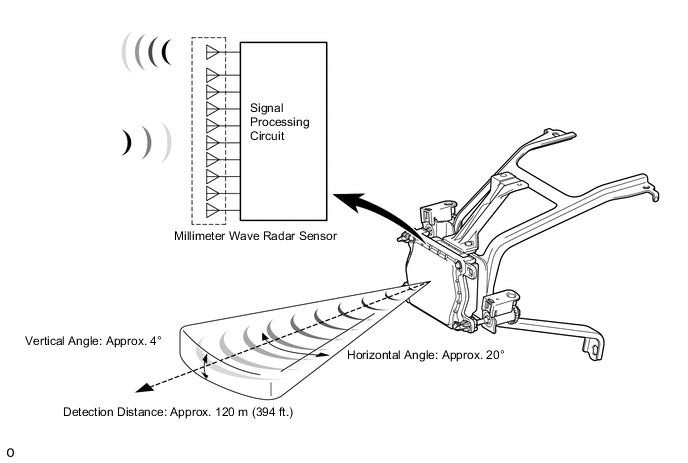
The millimeter wave radar sensor assembly consists of a millimeter wave radar circuit, signal processing circuit, and CPU.
-
The millimeter wave radar circuit consists of one transmission antenna and nine reception antennas.
-
The millimeter wave radar sensor assembly outputs millimeter waves when the vehicle speed is above 0 km/h (0 mph), and does not when the vehicle speed is at 0 km/h (0 mph). The millimeter wave radar sensor assembly uses frequencies in the 76 GHz band.
-
The reception antennas receive the millimeter waves that have been reflected.
-
The signal processing circuit detects the distance, relative speed, and the direction of the object by generating millimeter waves and calculating the signals received by the reception antennas. Then, it transmits this information to the driving support ECU.
Tech Tips
When either the driving support ECU or the ECM is replaced, the millimeter wave radar sensor assembly information stored in the replaced ECU must be initialized. For details, refer to the Repair Manual.
-
Calculation Method
The distance to the object, azimuth (horizontal angle), and relative speed are calculated from the information provided by reflected millimeter waves as described below:
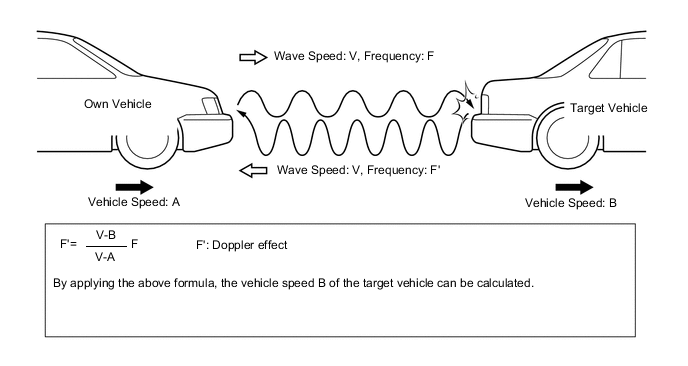
Distance Calculated based on the length of time between emission and reception of millimeter waves by the millimeter wave radar sensor assembly. Azimuth Calculated based on the angle of the millimeter waves reflected by an object. Relative Speed Calculated by utilizing the changes (Doppler effect) that occur in the frequencies of the reflected millimeter waves. Tech Tips
The Doppler effect causes the observer to perceive the radio waves emitted by a moving object to be at higher frequencies as it approaches, and to be at lower frequencies as it recedes. This phenomenon occurs because when an object is located far away, the radio waves are perceived to be at higher frequencies than when it is at the radio source.
Tech Tips
After a millimeter wave radar sensor assembly has been replaced or removed and reinstalled, an intelligent tester II must be used to adjust the sensor angle. To ensure the proper precision, the sensor must be adjusted in the horizontal and vertical state. For this reason, the sensor is provided with an area for placing at a level, as well as a horizontal adjusting screw and a vertical adjusting screw. For details, refer to the Repair Manual.
-