PRE-CRASH SAFETY SYSTEM DETAILS
-
FUNCTION OF MAIN COMPONENTS
Item Function Combination Meter PCS Warning Light Illuminates or flashes to warn the driver in accordance with signals from the seat belt control ECU or driving support ECU. Multi-information Display Displays a warning message to inform or warn the driver of the system condition in accordance with signals from the seat belt control ECU or driving support ECU. Master Warning Light Illuminates to warn the driver in accordance with signals from the seat belt control ECU or driving support ECU. Buzzer Sounds to warn the driver in accordance with signals from the seat belt control ECU or driving support ECU when the system is malfunctioning. Millimeter Wave Radar Sensor Radiates millimeter radio wave radar forward, uses the reflected millimeter radio wave for detecting the presence of a vehicle ahead, the vehicle-to-vehicle distance, and the relative speed, and then transmits this information to the driving support ECU. Front Seat Outer Belt Seat Belt Motor Retracts the seat belt in accordance with signals received from the seat belt control ECU. Front Seat Inner Belt (Driver) Buckle Switch Detects the condition (verifies if the belt is buckled) of the driver seat belt and transmits a signal to the center airbag sensor assembly. Front Seat Inner Belt (Front Passenger) Buckle Switch Detects the condition (verifies if the belt is buckled) of the front passenger seat belt and transmits a signal to the center airbag sensor assembly. Center Airbag Sensor Assembly Transmits the condition (fastened or unfastened) of the driver and front passenger seat belts to the seat belt control ECU. Driving Support ECU Makes judgments on whether a collision is unavoidable based on the information received from the millimeter wave radar sensor. It then outputs a seat belt operation signal and brake assist standby request signal and pre-crash safety brake request signal if required. Head up Display Unit (Combination Meter Mirror ECU) Display a warning message on the windshield to inform or warn the driver of the system condition in accordance with signals from the seat belt ECU or driving support ECU. Skid Control ECU
-
Receives a brake assist standby request signal from the driving support ECU and switches the brake assist to standby mode. When a stop light switch signal is input, it activates the brake assist.
-
Receives pre-crash safety brake request signal from the driving support ECU, it applies the brake.
-
Determines if the brakes have been applied suddenly through signals received from the master cylinder pressure sensor, and outputs a seat belt operation signal to the seat belt control ECU.
-
Determines the presence of front or rear wheel skid and outputs a seat belt operation signal to the seat belt control ECU.
-
Transmits vehicle speed signals to the driving support ECU.
Brake Actuator Master Cylinder Pressure Sensor Detects the master cylinder pressure and transmits a signal to the skid control ECU. Pump Motor Receives an operation signal from the skid control ECU and generates hydraulic pressure for brake control. Stop Light Switch Detects if the brake pedal is depressed and transmits a signal to the skid control ECU. Speed Sensor Detects speed of each wheel speed and transmits the signals to the skid control ECU. Yaw Rate and Acceleration Sensor Detects the yaw rate and lateral/longitude deceleration of the vehicle and transmits the signal to the skid control ECU and the driving support ECU. Steering Angle Sensor Detects the angle and direction of steering and transmits a signal to the skid control ECU and the driving support ECU. Pre-crash Brake OFF Switch * Disables the pre-crash brake operation when the switch is turned on. The PCS warning light illuminates to notify that the pre-collision system brake assist control is off. Skid Control Buzzer Assembly Sounds to warn the driver in accordance with signals from the skid control ECU.
-
*: Models with Pre-crash Brake
-
-
OPERATING CONDITION
-
Operating Condition
Operating Condition
-
When a collision with an obstacle in front of the vehicle or a collision with the vehicle ahead is determined to be unavoidable.
-
The pre-crash safety seat belt operates even under the following conditions:
-
When the brakes are suddenly applied.
-
When the front wheels lose grip in relation to the rear wheels (front wheel skid tendency).
-
When the rear wheels lose grip in relation to the front wheels (rear wheel skid tendency).
Non-Operating Condition
-
The relative speed of an oncoming vehicle is approximately 30 km/h (20 mph) or less.
-
Vehicle speed is approximately 5 km/h (3 mph) or less.
-
The seat belt is not buckled.
-
The vehicle collides with an object that the millimeter wave radar sensor cannot detect (plastic items, safety cones, etc.) or cannot detect in a stable manner (people, bicycles, motorcycles, trees, animals, snow fence, etc.).
-
The power switch is off or on (ACC).
-
The multi-information display in the combination meter warning messages.
-
The vehicle collides with an object located outside the detection area of the millimeter wave radar sensor.
-
-
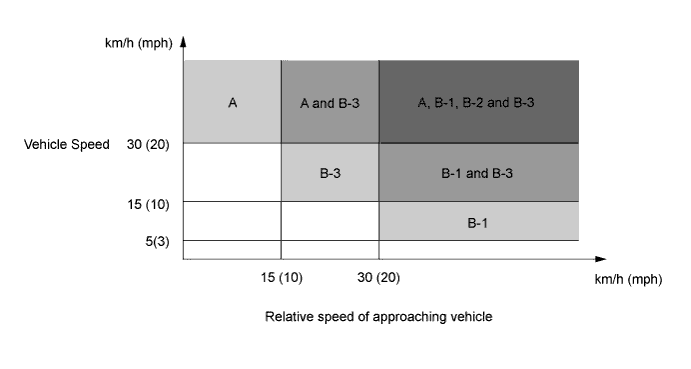
The pre-crash safety system consists of the following three operations: a pre-crash (unavoidable collision) operation, front or rear wheel skid tendency operation and sudden braking operation. The impact dampening components consists of the operation ranges indicated below.
Range Operation Operation Condition Impact Dampening Component A Front or Rear Wheel Skid Tendency Operation
-
Power switch is on (IG)
-
Seat belt is buckled.
-
Vehicle speed is approximately 30 km/h (20 mph) or more.
-
Seat Belt Retracting Operation
Sudden Braking Operation B-1 Pre-crash Safety System Operation
-
Power switch is on (IG).
-
Seat belt is buckled.
-
Vehicle speed is approximately 5 km/h (3 mph) or more
-
Oncoming vehicle relative speed is approximately 30 km/h (20 mph) or more.
-
Seat Belt Retracting Operation
B-2
-
Power switch is on (IG).
-
Seat belt is buckled.
-
Vehicle speed is approximately 30 km/h (20 mph) or more.
-
Oncoming vehicle relative speed is approximately 30 km/h (20 mph) or more.
-
Seat Belt Retracting Operation
-
Brake Assist Standby Condition
-
Pre-crash safety Brake Operation
B-3
-
Power switch is on (IG).
-
Seat belt is buckled.
-
Vehicle speed is approximately 15 km/h (10 mph) or more.
-
Oncoming vehicle relative speed is approximately 15 km/h (10 mph) or more.
-
Pre-crash safety Brake Operation
-
-
-
SYSTEM CONTROL
-
Understeer or Oversteer Tendency Operation
(1) While the vehicle is traveling at approximately 30 km/h (20 mph) or more, the skid control ECU determines if skid recovery will be difficult based on the signals from the steering angle sensor, yaw rate and deceleration sensor and speed sensors. (2) The skid control ECU sends a seat belt operation request signal to the seat belt control ECU. (3) The seat belt control ECU determines the seat belt motor operating conditions based on this signal and seat belt buckle switch signals. Then, it retracts the slack in the seat belts by operating the seat belt motors. (4) The seat belts return to a normal state when the relevant conditions of the vehicle have stabilized. 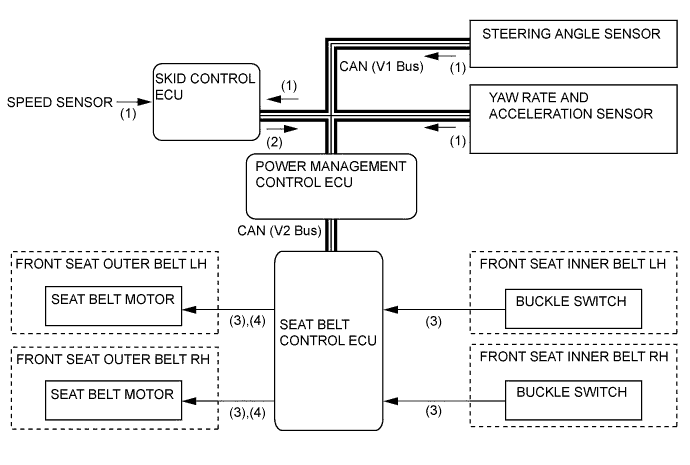
-
Sudden Braking Operation
(1) While the vehicle is traveling at approximately 30 km/h (20 mph) or more, the skid control ECU can determine a sudden braking condition based on the signals from the master cylinder pressure sensor, stop light switch and speed sensors. (2) At this time, the skid control ECU outputs a seat belt operation request signal to the seat belt control ECU. (3) The seat belt control ECU determines the seat belt motor operating conditions based on this signal and seat belt buckle switch signals. Then, it retracts the slack in the seat belts by operating the seat belt motors. (4) The seat belts return to a normal state when the brake pedal is released. 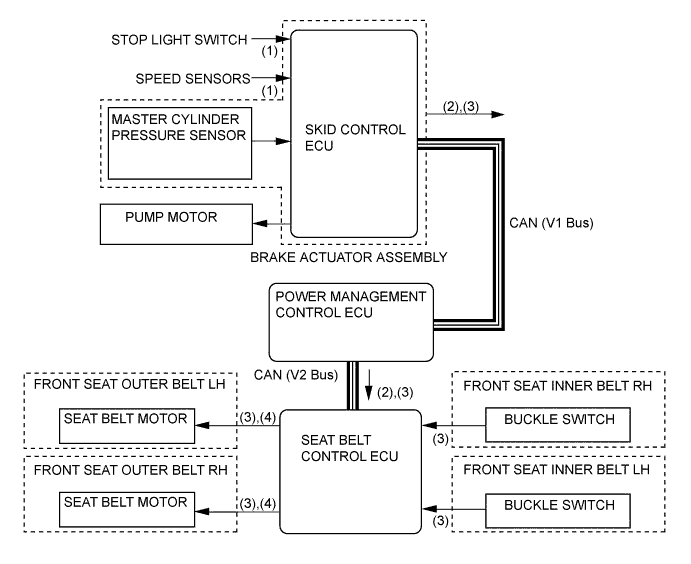
-
Pre-crash Safety Operation
Models without Pre-crash Brake (1) The driving support ECU determines that the possibility of a collision is high based on signals received from the millimeter wave radar sensor, steering angle sensor, speed sensor and yaw rate sensor. (2) The driving support ECU determines that the a collision is unavoidable based on signals received from the millimeter wave radar sensor, steering angle sensor, speed sensor and yaw rate sensor. (3) The driving support ECU a seat belt operation request signal to the seat belt control ECU and a brake assist control request signal to the skid control ECU. (4) The seat belt control ECU determines the seat belt motor operation condition based on this signal and the seat belt buckle switch signal, and retracts the slack in the seat belts by operating the seat belt motors. (5) When the brake assist is in the standby condition and the stop light switch ON signal is input into the skid control ECU, this ECU operates the brake assist based on the master cylinder pressure sensor. (6) If no collision occurs, the seat belts and the brake assist will return to their normal states. 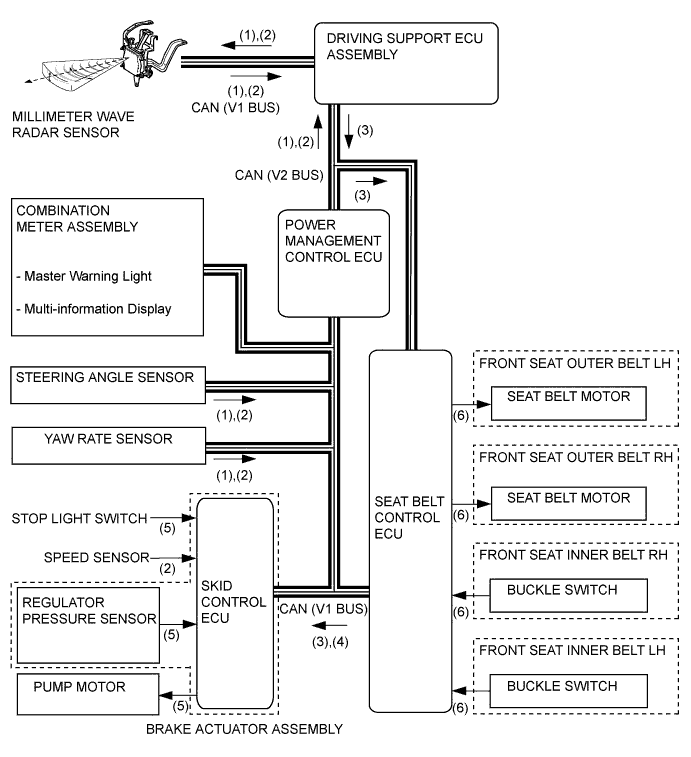
Models with Pre-crash Brake (1) The driving support ECU determines that the possibility of a collision is high based on the signals received from the millimeter wave radar sensor, steering angle sensor, speed sensor and yaw rate sensor. (2) The driving support ECU transmits a BRAKE! warning display request signal to the multi-information display, headup display, and a VSC warning buzzer request signal to the skid control ECU. (3) The driving support ECU determines that an unavoidable collision condition exists based on the signals received from the millimeter wave radar sensor, speed sensor, steering angle sensor and yaw rate sensor. (4) The driving support ECU outputs a pre-crash brake assist request signal to the skid control ECU. Upon receiving this signal, the skid control ECU switches the brake assist to the standby condition. (5) The driving support ECU outputs a seat belt operation request signal to the seat belt control ECU and a pre-crash brake request signal to the skid control ECU. (6) The seat belt control ECU determines the seat belt motor operation condition based on this signal and the seat belt buckle switch signal, and retracts the slack in the seat belts by operating the seat belt motors. At the same time, the skid control ECU activates the brake actuator as a pre-crash brake control and decelerates the vehicle. (7) If no collision occurs, the seat belts and the brake assist will return to their normal states. 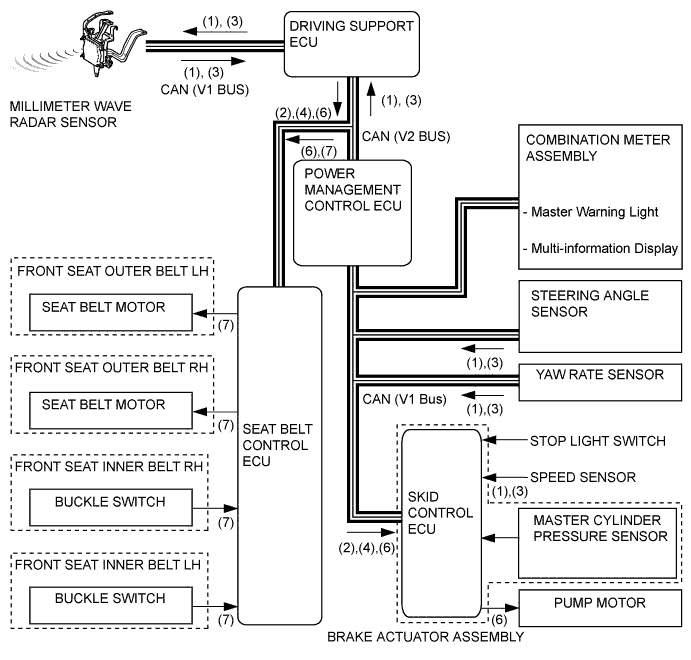
-
-
FUNCTION
-
Warning Messages Displayed in Combination Meter
-
The combination meter uses a master warning light, PCS warning light, buzzer and multi-information display and headup display to provide the driver with pre-crash Safety system warnings and indications.
-
If the driving support ECU determines that there is a possibility of a collision, it sends a signal to the combination meter. Upon receiving this signal, the combination meter indicates a warning on the multi-information display, headup display, master warning light and PCS warning light. Details are indicated below.
-
If the driving support ECU determines that the possibility of a collision is high, it sends a signal to the combination meter. Upon receiving this signal, the combination meter indicates a warning on the multi-information display, headup display, master warning light, PCS warning light and sounds the skid control buzzer. Details are indicated below.
-
2 types of warning messages are used for the pre-crash safety system, as described below. The pre-crash safety system will not operate when these messages appear in the combination meter.
When there is a possibility of a collision Headup Display Multi-information Display Master Warning Light PCS Warning Light Skid Control Buzzer 
- Flashes Sounds Continuously The background of the message on the head-up display flashes at 0.1 second intervals. When there is a high possibility of a collision Headup Display Multi-information Display Master Warning Light PCS Warning Light Skid Control Buzzer 
- Flashes Sounds Continuously The background of the message on the head-up display flashes at 0.2 second intervals. When there is a high possibility of a collision Multi-information Display Detail Master Warning Light PCS Warning Light Buzzer DTC 
This message appears when the seat belt control ECU detects a system malfunction. Illuminates Flashes Sounds once X 
-
This message appears when the seat belt control ECU determines the following conditions:
-
Dirty front millimeter wave radar sensor
-
Poor weather condition
-
Overheated seat belt control ECU
After these conditions have been resolved, the system will operate normally.
- Illuminates - -
-
X: Repair is required/ DTC are output
-
-: Repair is not required/DTC are not output
-
-
-
-
CONSTRUCTION
-
Millimeter Wave Radar Sensor
-
The millimeter wave radar sensor consists of a millimeter wave radar circuit, signal processing circuit, and CPU.
-
The millimeter wave radar outputs waves when the vehicle speed is above 0 km/h (0 mph), The millimeter wave radar uses frequencies in the 76 GHz band.
-
The reception antennas receive the millimeter wave radar waves that have been reflected.
-
The signal processing circuit detects the distance, relative speed, and the direction of the object by generating millimeter wave radar waves and calculating the signals received by the reception antennas. Then, it transmits this information to the driving support ECU.
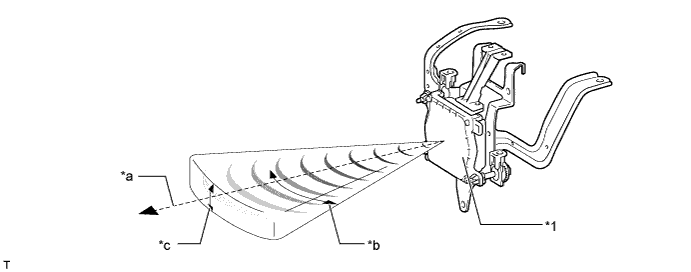
Text in Illustration *1 Millimeter Wave Radar Sensor - - *a Detection Distance *b Horizontal Angle *c Vertical Angle - - -
The distance to the object, azimuth, and relative speed are calculated from the information that is provided by the reflection millimeter wave radar as described below.
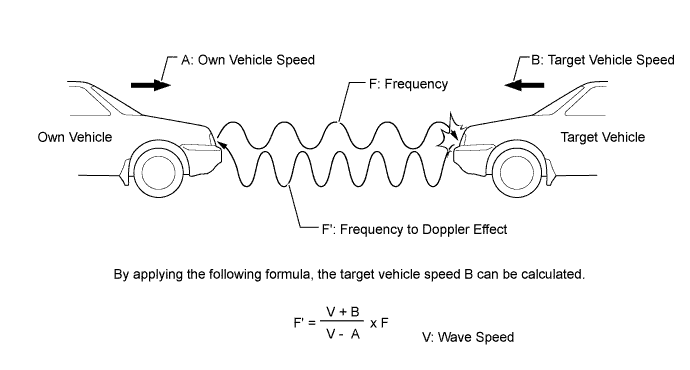
Item Calculation Method Distance Calculated from the length of time that has elapsed from the time the waves of the millimeter wave radar have been emitted, until the waves reflected by the millimeter wave radar are received. The detection distance is approximately 150 m (490 ft.). Azimuth Calculated from the angle of the waves reflected by the millimeter wave radar that have been received. Detection angle has a horizontal angle of approximately 20° and a vertical angle of approximately 8°. Relative Speed Calculated by utilizing the changes (Doppler effect*) that occur in the frequencies of the reflected millimeter wave radar waves. Tech Tips
*: The Doppler effect causes the observer to perceive the radio waves emitted by a moving object to be of higher frequencies as it approaches, and to be of lower frequencies at it recedes. This phenomenon is created because when an object is located far away, the radio waves are perceived at higher frequencies than those of the radio source.
Tech Tips
An SST is used if radar axis adjustment is needed. For details, refer to the Repair Manual
-
-
-
DIAGNOSIS
-
Initial Check
-
The seat belt control ECU performs an initial check on the system for approximately 3 seconds after the power switch has been turned on (IG).
-
-
Monitor Function
-
(1) After completing the initial check, the pre-crash safety system becomes ready to operate. During this time, the seat belt control ECU periodically monitors the system for any malfunctions.
-
-
Diagnostic Trouble Code (DTC)
-
If the seat belt control ECU detects a malfunction in the pre-collision system, it stores a 5- digit Diagnostic Trouble Code (DTC) in memory.
-
-