HYBRID CONTROL SYSTEM DETAILS
-
FUNCTION OF MAIN COMPONENTS
-
The main components of the hybrid system have the following functions:
Component Function Power Management Control ECU (HV CPU)
-
Performs comprehensive control of the hybrid system.
-
Information from various sensors as well as from ECUs (ECM, MG ECU, battery smart unit and skid control ECU) is received, and based on this the required torque and output power is calculated. The power management control ECU (HV CPU) transmits the calculated result to the ECM, MG ECU and skid control ECU.
-
Monitors the SOC of the HV battery.
-
Controls the DC-DC converter.
-
Controls the inverter water pump assembly.
-
Controls the HV battery cooling blower.
Hybrid Vehicle Transaxle Assembly Motor Generator 1 (MG1) MG1, which is driven by the engine, generates high-voltage electricity in order to operate MG2 and charge the HV battery. Also, it functions as a starter to start the engine. Motor Generator 2 (MG2)
-
MG2, which is driven by electrical power from MG1 and the HV battery, generates motive force for the drive wheels.
-
During braking, or when the accelerator pedal is not depressed, it generates high-voltage electricity to recharge the HV battery.
Resolver (for MG1/for MG2) Detects the rotor position, rotational speed and direction of MG1 and MG2. Temperature Sensor (for MG1/for MG2) Detects the temperature of MG1 and MG2. Compound Gear Unit Power Split Planetary Gear Unit Distributes the engine motive force as appropriate to directly drive the vehicle as well as MG1. Motor Speed Reduction Planetary Gear Unit Reduces the rotational speed of MG2 in accordance with the characteristics of the planetary gear, in order to increase torque. Inverter with Converter Assembly Inverter Converts the direct current from the boost converter into the alternating current for MG1 and MG 2, and vice versa (from AC to DC). Boost Converter Boosts the HV battery nominal voltage of DC 201.6 V up to a maximum voltage of DC 650 V and vice versa (drops DC 650 V to DC 201.6 V). DC-DC Converter Drops the HV battery nominal voltage of DC 201.6 V to approximately DC 14 V in order to supply electricity to the electrical components, as well as to recharge the auxiliary battery. MG ECU Controls the inverter and boost converter in accordance with the signals received from the power management control ECU (HV CPU), thus operating MG1 and MG2 as either a generator or motor. Atmospheric Pressure Sensor Detects the atmospheric pressure. Temperature Sensor (for Inverter with Converter Assembly) Detects temperatures in the parts of the inverter with converter assembly as well as the HV coolant temperature. Inverter Current Sensor Detects the current of MG1 and MG2. HV Battery Assembly HV Battery (Battery Modules)
-
Supplies electrical power to MG1 and MG2 in accordance with the driving conditions of the vehicle.
-
Recharged by MG1 and MG2 in accordance with the SOC and the driving conditions of the vehicle.
HV Battery Temperature Sensor Detects temperatures in the parts of the HV battery and the Intake air temperature from the HV battery cooling blower. Hybrid Battery Junction Block Assembly System Main Relays Connects and disconnects the high-voltage circuit between the HV battery and the inverter with converter assembly, through the use of the signals from the power management control ECU (HV CPU). HV Battery Current Sensor Detects the input and output current of the HV battery. Battery Smart Unit
-
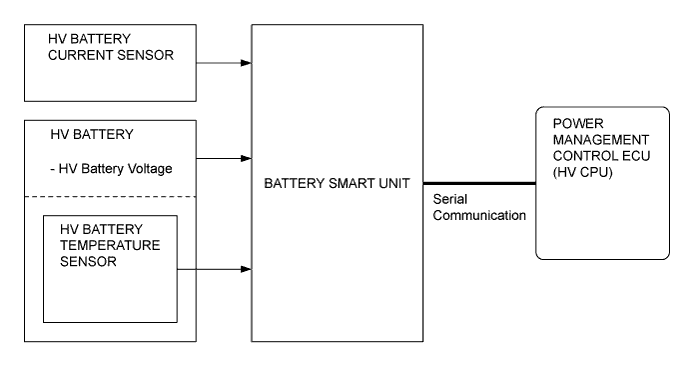
Monitors the conditions of the HV battery such as voltage, current and temperature, and transmits this information to the power management control ECU (HV CPU).
-
Monitors the high-voltage system for breakdown of the electrical insulation.
Service Plug Grip Shuts off the high-voltage circuit of the HV battery when the service plug grip is removed for vehicle inspection or maintenance. Interlock Switch (for Service Plug Grip/for Inverter Terminal Cover/for Power Cable Connector) Verifies that the service plug grip, inverter terminal cover and inverter power cable connector are installed. Power Cable Connects the HV battery, inverter with converter assembly, hybrid vehicle transaxle assembly and cooler compressor with motor assembly. Inverter Water Pump Assembly Operates by the signal from the power management control ECU (HV CPU) in order to cool the inverter with converter assembly and MG1. HV Battery Cooling Blower Operates by the signal from the power management control ECU (HV CPU) in order to cool the HV battery. Auxiliary Battery Supplies electricity to the electrical components. Auxiliary Battery Temperature Sensor Detects the temperature of the auxiliary battery. Power Switch Starts and stops the hybrid system. Accelerator Pedal Position Sensor Converts the accelerator pedal position into an electrical signal and outputs it to the power management control ECU (HV CPU). Shift Lever Position Sensor Converts the shift lever operation into an electrical signal and outputs it to the power management control ECU (HV CPU). P Position Switch Outputs the P position switch signal to the power management control ECU (HV CPU) when operated by the driver. Stop Light Switch Detects the brake pedal depressed. EV Drive Mode Switch Outputs the EV drive mode switch signal to the power management control ECU (HV CPU) when operated by the driver. PWR MODE Switch Outputs the PWR MODE switch signal to the power management control ECU (HV CPU) via the ECM when operated by the driver. ECO MODE Switch Outputs the ECO MODE switch signal to the power management control ECU (HV CPU) via the air conditioning amplifier when operated by the driver. ECM
-
Performs control of the engine in accordance with the target engine speed and required engine motive force received from the power management control ECU (HV CPU).
-
Transmits various engine operating condition signals to the power management control ECU (HV CPU).
Skid Control ECU
-
During braking, it calculates the required regenerative braking force and transmits it to the power management control ECU (HV CPU).
-
Transmits the request to the power management control ECU (HV CPU) to limit motive force while the TRC or VSC is operating.
Air Conditioning Amplifier Transmits various A/C state signals to the power management control ECU (HV CPU). Airbag ECU Assembly During a collision, it transmits the airbag deployment signal to the power management control ECU (HV CPU). Combination Meter Assembly READY Indicator Light Informs the driver that the vehicle is ready to drive. Shift Position Indicator Shows the shift position selected by the driver. EV Drive Mode Indicator Light Informs the driver that the EV drive mode is entered. PWR MODE Indicator Light Informs the driver that the PWR mode is selected. ECO MODE Indicator Light Informs the driver that the ECO mode is selected. Discharge Warning Light Turns on when there is a malfunction in the auxiliary battery charging system. Check Engine Warning Light Turns on when there is a malfunction in the hybrid control system and engine control system. Multi-information Display
-
The multi-information display displays messages to inform the driver when a malfunction occurs. It also displays system status and operation instructions.
-
The master warning light may illuminate or flash and the buzzer may sound depending on the message displayed on the multi-information display.
-
The power management control ECU (HV CPU) displays the visual indicators that express the operating states of the hybrid system on the multi-information display. The visual indicators are as follows: Energy Monitor, Hybrid System Indicator and Eco Driving Indicator Light.
-
-
-
OPERATING CONDITION
-
Hybrid System Activation (READY-on State)
-
The hybrid system can be activated by pressing the power switch while the brake pedal is being depressed. At this time, the READY indicator light flashes until the system check is completed. When the READY indicator light turns to on, the hybrid system starts and informs the driver that the vehicle is ready to drive. For details about the power switch operations, refer to Entry and Start System.
-
Even if the driver turns the power switch on (READY), sometimes the power management control ECU (HV CPU) will not start the engine. The engine will only start if conditions such as engine coolant temperature, SOC, HV battery temperature and electrical load require an engine start.
-
After driving, when the driver stops the vehicle and turns the P position switch on, the power management control ECU (HV CPU) allows the engine to continue running. The engine will stop after the SOC, HV battery temperature and electrical load reach a specified condition level.
Note
When the hybrid system is unavoidably required to be stopped while driving, the system can be forced to stop by pressing and holding the power switch for approximately 3 seconds or more. At this time, the power source will be turned on (ACC).
-
-
EV Drive Mode
-
When all required conditions, some of which are listed below, are satisfied, the EV drive mode can be used.
Operating Condition
-
The hybrid system temperature is not high. (The hybrid system temperature will be high when the outside air temperature is high or after the vehicle has traveled up a hill or at high speeds.)
-
The hybrid system temperature is not low. (The hybrid system temperature will be low after the vehicle has been left for a long time when the outside air temperature is low.)
-
The engine coolant temperature is approximately 0°C (32°F) or more.
-
The SOC is approximately 50% or more.
-
The vehicle speed is approximately 30 km/h (19 mph) or less. (Cold Engine Conditions)
-
The vehicle speed is approximately 45 km/h (28 mph) or less. (Warm Engine Conditions)
-
The accelerator pedal depression amount is a certain level or below.
-
The defroster is off.
-
The cruise control system is not operating.
Tech Tips
The available cruising range during the EV drive mode varies according to the SOC of the HV battery and the driving conditions such as road surfaces and hills. However, it is usually between several hundred meters (several hundred yards) and approximately 2 km (1.2 miles).
-
-
-
SOC (state of charge)
-
The power management control ECU (HV CPU) estimates the SOC of the HV battery from the accumulated amperage that is constantly and repeatedly being charged and discharged. In order to maintain the SOC at the appropriate level all the time, the power management control ECU (HV CPU) controls the hybrid system optimally.
-
-
Detection of Insulation Resistance Decrease
-
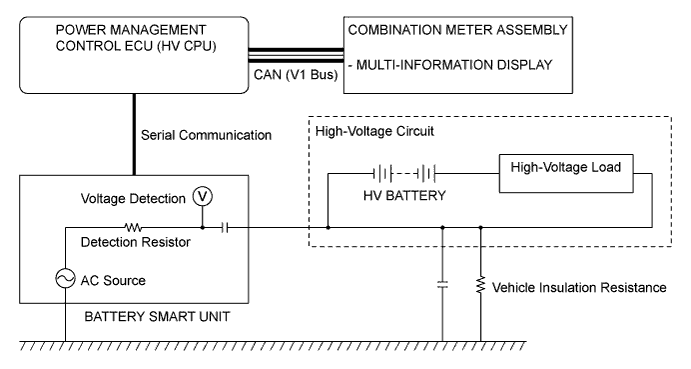
The leak detection circuit is built in the battery smart unit. The leak detection circuit constantly monitors that the insulation resistance between high-voltage circuits and body ground is maintained.
-
The power management control ECU (HV CPU) determines decreases in the insulation resistance based on the information from the battery smart unit.
-
The leak detection circuit has an AC source and it causes a small amount of AC to flow to the high-voltage circuit (positive and negative).
-
The more vehicle insulation resistance decreases, the more voltage drops at the detection resistor and the lower the waves of AC. The insulation resistance value is detected based on the amplitude of AC waves.
-
-
Cut-off of High-Voltage Circuits during Collision
-
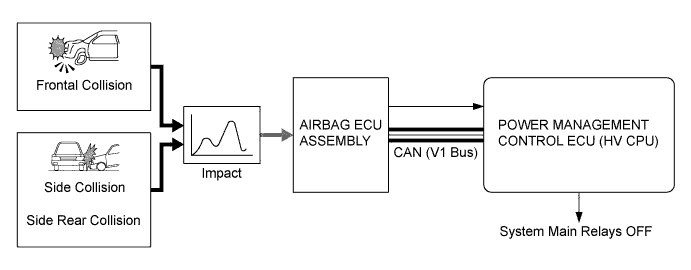
If the vehicle encounters one of the situations described below, the power management control ECU (HV CPU) will shut down the power supply by turning the system main relays off, for safety.
-
The power management control ECU (HV CPU) receives the airbag deployment signal from the airbag ECU assembly during a frontal collision, side collision or side rear collision.
-
-
-
SYSTEM CONTROL
-
Control List
-
The hybrid system consists of the controls listed below.
Control Outline Hybrid Vehicle Control
-
The power management control ECU (HV CPU) calculates the target motive force based on the shift lever position sensor, the degree to which the accelerator pedal is depressed, and the vehicle speed. It performs control in order to create the target motive force by optimally combining MG1, MG2 and the engine.
-
The power management control ECU (HV CPU) calculates the engine motive force based on the target motive force, which has been calculated based on the requirements of the driver and the driving conditions of the vehicle. In order to create this motive force, the power management control ECU (HV CPU) transmits the signals to the ECM.
-
The power management control ECU (HV CPU) monitors the SOC of the HV battery and the temperature of the HV battery, MG1 and MG2, in order to optimally control these items.
SOC Control
-
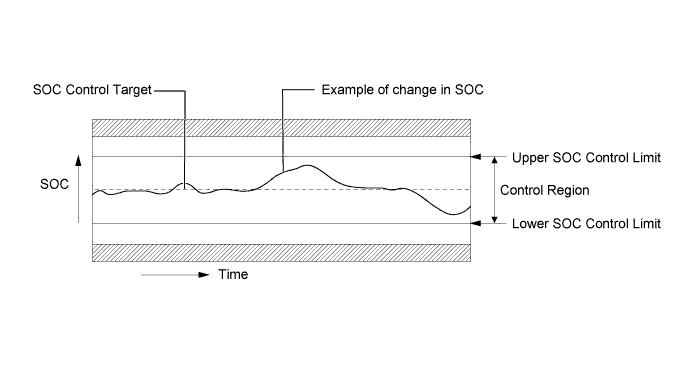
The power management control ECU (HV CPU) calculates the SOC by estimating the charging and discharging amperage of the HV battery.
-
The power management control ECU (HV CPU) constantly performs charge/discharge control based on the calculated the SOC in order to maintain the SOC within its target range.
Engine Control The ECM receives the target engine speed and required engine motive force, which were sent from the power management control ECU (HV CPU), and controls the ETCS-i, fuel injection volume, ignition timing, VVT-i and EGR. MG1 and MG2 Main Control
-
MG1, which is driven by the engine, generates high-voltage electricity in order to operate MG2 and charge the HV battery. Also, it functions as a starter to start the engine.
-
MG2, which is driven by electrical power from MG1 and the HV battery, generates motive force for the drive wheels.
-
MG2 generates high-voltage electricity to charge the HV battery during braking (regenerative brake cooperative control), or when the accelerator pedal is not being depressed (energy regeneration).
-
MG1 and MG2 are basically shut down when the shift position is in N. In order to stop providing motive force, it is necessary to stop driving MG1 and MG2, because MG1 and MG2 are mechanically joined to the drive wheels.
Inverter Control
-
The inverter converts the direct current from the HV battery into the alternating current for MG1 and MG2, or vice versa, in accordance with the signals provided by the power management control ECU (HV CPU) via the MG ECU. In addition, the inverter is used to transfer power from MG1 to MG2.
-
The power management control ECU (HV CPU) shuts down the inverter if it receives the overheating, overcurrent or fault voltage signal from the inverter via the MG ECU.
Boost Converter Control
-
The boost converter boosts the HV battery nominal voltage of DC 201.6 V up to a maximum voltage of DC 650V, in accordance with the signals provided by the power management control ECU (HV CPU) via the MG ECU.
-
The inverter converts the alternating current generated by MG1 or MG2 into the direct current. The boost converter drops the generated voltage of DC 650 V (maximum voltage) to approximately DC 201.6 V, in accordance with the signals provided by the power management control ECU (HV CPU) via the MG ECU.
DC-DC Converter Control The DC-DC converter drops the HV battery nominal voltage of DC 201.6 V to approximately DC 14 V in order to supply electricity to the electrical components, as well as to recharge the auxiliary battery. System Main Relay Control To ensure that it is possible to connect and disconnect the high-voltage circuits reliably, the power management control ECU (HV CPU) controls the 3 system main relays to connect and disconnect the high-voltage circuits from the HV battery. The power management control ECU (HV CPU) also uses the timing of the operation of the 3 system main relays to monitor the operation of the relay contacts. Cooling System (for Inverter with Converter Assembly and MG1) Control In order to cool the inverter with converter assembly and MG1, the power management control ECU (HV CPU) regulates the inverter water pump assembly according to the signals from the temperature sensor (for inverter with converter assembly), temperature sensor (for MG1) and temperature sensor (for MG2). Cooling System (for HV Battery) Control In order to maintain the HV battery temperature at the optimum level, the power management control ECU (HV CPU) regulates the HV battery cooling blower according to the signal from the HV battery temperature sensor. Regenerative Brake Cooperative Control During braking, the skid control ECU calculates the required regenerative braking force and transmits it to the power management control ECU (HV CPU). Upon receiving this signal, the power management control ECU (HV CPU) transmits the actual regenerative brake control value to the skid control ECU. Based on this result, the skid control ECU calculates and executes the required hydraulic braking force. TRC/VSC Cooperative Control The skid control ECU transmits the request to the power management control ECU (HV CPU) to limit motive force while the TRC or VSC is operating. The power management control ECU (HV CPU) controls the engine and MG2 in accordance with the present driving conditions in order to suppress the motive force. For details, refer to Brake Control System. During Collision Control During a collision, if the power management control ECU (HV CPU) receives the airbag deployment signal from the airbag ECU assembly, it turns the system main relays off in order to shut off the high-voltage from the HV battery. Cruise Control System Operation Control When the power management control ECU (HV CPU) receives the cruise control main switch signal, it controls the motive forces of the engine and MG2 to be an optimum combination in order to obtain the target vehicle speed by the driver's demand. For details, refer to Cruise Control System. Dynamic Radar Cruise Control System Operation Control*1 Upon receiving the motive force request signal from the driving support ECU, the power management control ECU (HV CPU) controls the motive forces of the engine and MG2 to be an optimum combination in order to obtain the target vehicle speed. For details, refer to Dynamic Radar Cruise Control System. Intelligent Parking Assist System Operation Control*2 Upon receiving the creep up request signal from the parking assist ECU, the power management control ECU (HV CPU) increases the motive force of MG2 to ensure the system operation. For details, refer to Intelligent Parking Assist System. Shift Control The power management control ECU (HV CPU) detects the shift position (P, R, N, D or B) in accordance with the signals provided by the shift lever position sensor and P position switch. The power management control ECU (HV CPU) controls MG1, MG2 and the engine to match the selected shift position. EV Drive Mode Control When the EV drive mode switch is operated by the driver, the power management control ECU (HV CPU) uses only MG2 to drive the vehicle if the operating conditions are satisfied. PWR Mode Control When the PWR MODE switch is operated by the driver, the power management control ECU (HV CPU) moderates the response of the accelerator pedal operation to optimize acceleration. ECO Mode Control When the ECO MODE switch is operated by the driver, the power management control ECU (HV CPU) moderates the response of the accelerator pedal operation to support Eco driving.
-
*1: Models with dynamic radar cruise control system
-
*2: Models with intelligent parking assist system
-
-
-
Hybrid Vehicle Control
-
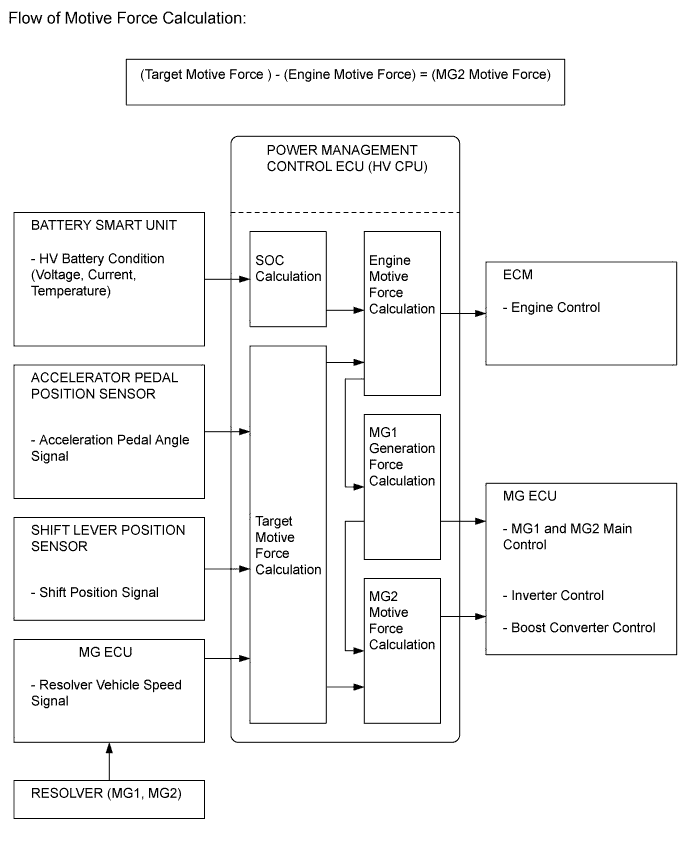
The power management control ECU (HV CPU) detects the amount of accelerator pedal depression using the signals from the accelerator pedal position sensor and detects the shift position signals from the shift lever position sensor. The power management control ECU (HV CPU) receives the resolver vehicle speed signals from the MG1 and MG2 resolvers via the MG ECU. The power management control ECU (HV CPU) determines the driving conditions of the vehicle in accordance with this information, and optimally controls the motive forces of MG1, MG2 and the engine. Furthermore, the power management control ECU (HV CPU) optimally controls the output and torque of MG1, MG2 and the engine in order to deliver lower fuel consumption and cleaner exhaust emissions.
-
The power management control ECU (HV CPU) calculates the engine motive force based on the calculated target motive force, and by taking the SOC and the temperature of the HV battery into consideration. The value obtained by subtracting the engine motive force from the target motive force is the MG2 motive force.
-
The ECM performs control of the engine in accordance with the target engine speed and required engine motive force received from the power management control ECU (HV CPU). Furthermore, the power management control ECU (HV CPU) appropriately operates MG1 and MG2 in order to provide the required MG1 generation force and the required MG2 motive force.
-
-
SOC Control
-
The power management control ECU (HV CPU) calculates the SOC of the HV battery based on the charge/discharge amperages detected by the HV battery current sensor. The power management control ECU (HV CPU) constantly performs charge/discharge control based on the calculated the SOC in order to maintain the SOC within its target range.
-
While the vehicle is in motion, the HV battery undergoes repetitive charge/discharge cycles, as it becomes discharged by MG2 during acceleration and charged by regenerative brake during deceleration.
-
When the SOC is below the lower level, the power management control ECU (HV CPU) increases the power output of the engine to operate MG1, which charges the HV battery.
-
The battery smart unit converts the HV battery related signals (voltage, current and temperature) into digital signals, and transmits them to the power management control ECU (HV CPU) via serial communication. These signals are needed to determine the SOC that is calculated by the power management control ECU (HV CPU).
-
-
Engine Control
-
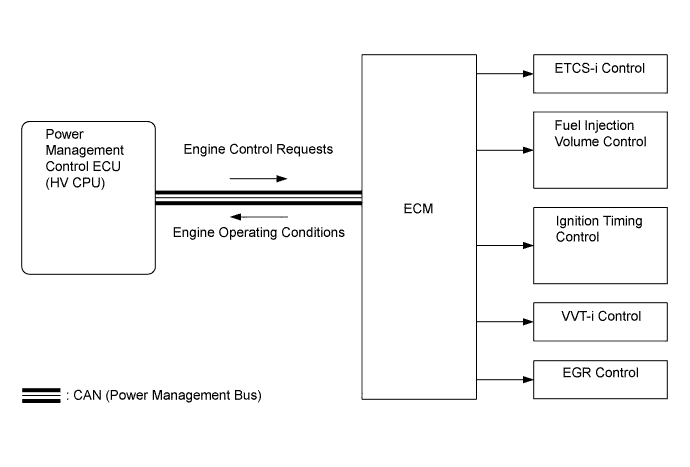
The ECM receives the target engine speed and required engine motive force, which were sent from the power management control ECU (HV CPU), and controls the ETCS-i, fuel injection volume, ignition timing, VVT-i and EGR.
-
The ECM transmits the operating condition of the engine to the power management control ECU (HV CPU).
-
Upon receiving the engine stop signal from the power management control ECU (HV CPU) in accordance with the basic hybrid vehicle control, the ECM will stop the engine.
-
-
MG1 and MG2 Main Control
-
MG1, which is driven by the engine, generates high-voltage electricity in order to operate MG2 and charge the HV battery. Also, it functions as a starter to start the engine.
-
MG2, which is driven by electrical power from MG1 and the HV battery, generates motive force for the drive wheels.
-
MG2 generates high-voltage electricity to charge the HV battery during braking (regenerative brake cooperative control), or when the accelerator pedal is not being depressed (energy regeneration).
-
MG1 and MG2 are basically shut down when the shift position is in N. In order to stop providing motive force, it is necessary to stop driving MG1 and MG2, because MG1 and MG2 are mechanically joined to the drive wheels.
-
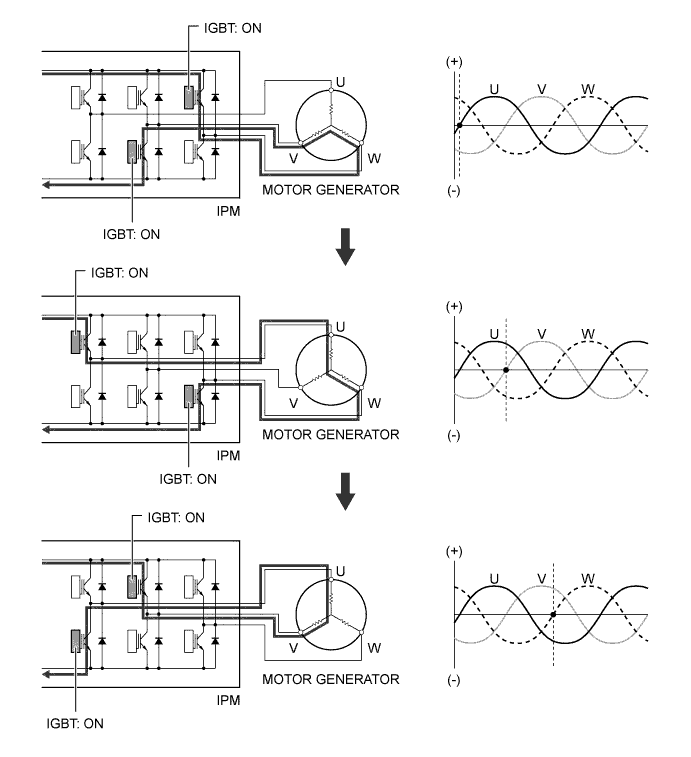
The MG ECU controls the Insulated Gate Bipolar Transistors (IGBTs) in the Intelligent Power Module (IPM) for switching the U, V, and W phases of motor generator in accordance with the signals received from the power management control ECU (HV CPU). The 6 IGBTs switch on and off to control each individual motor generator in accordance with operation as either a motor or as a generator.
-
The illustration below describes the basic control used when the motor generator functions as a motor. The IGBTs in the IPM switch on and off to supply three-phase alternating current to the motor generator. In order to create the motive force required of the motor generator as calculated by the power management control ECU (HV CPU), the MG ECU switches the IGBTs on and off and controls the speed, in order to control the speed of the motor generator.
-
The illustration below describes the basic control used when the motor generator functions as a generator. The current that is generated sequentially by the 3 phases of the motor generator, which is driven by the wheels, is utilized to charge the HV battery or drive another motor generator.

-
-
Inverter Control
-
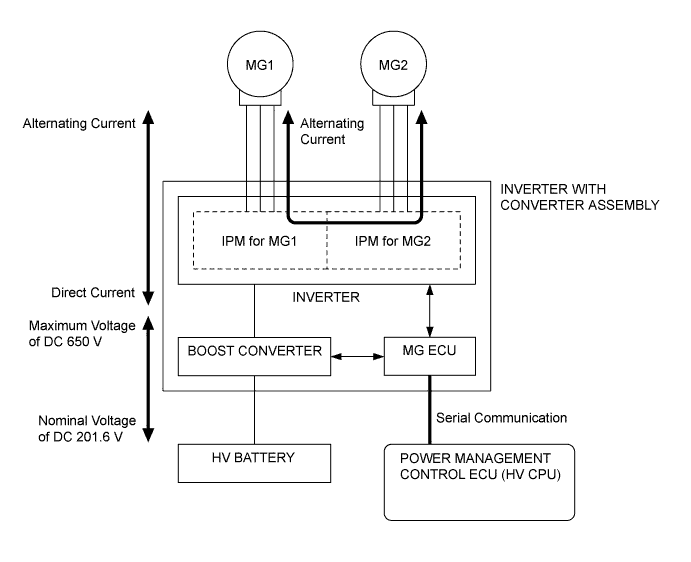
The inverter converts the direct current from the HV battery into alternating current for MG1 and MG2, or vice versa. In addition, the inverter takes power generated by MG1 and supplies it to MG2. However, the electricity generated by MG1 is converted into the direct current inside the inverter before being converted back into the alternating current by the inverter for use by MG2. This is necessary because the frequency of the alternating current output by MG1 is not appropriate for control of MG2.
-
The MG ECU controls the IPMs for switching the three-phase alternating current of MG1 and MG2 in accordance with the signals received from the power management control ECU (HV CPU).
-
When the power management control ECU (HV CPU) has received an overheating, overcurrent, or fault voltage signal from the MG ECU, the power management control ECU (HV CPU) transmits a shut down control signal to the MG ECU, in order to turn off the IPMs.
-
-
Boost Converter Control
-
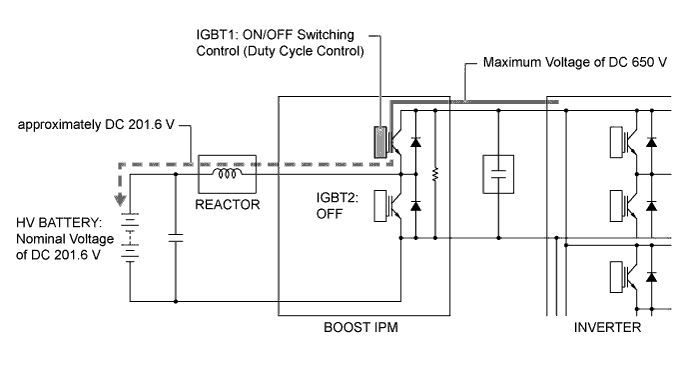
The boost converter boosts the HV battery nominal voltage of DC 201.6 V up to a maximum voltage of DC 650 V, in accordance with the signals provided by the power management control ECU (HV CPU) via the MG ECU.
-
The inverter converts the alternating current generated by MG1 or MG2 into direct current. The boost converter drops the generated voltage of DC 650 V (maximum voltage) to approximately DC 201.6 V, in accordance with the signals provided by the power management control ECU (HV CPU) via the MG ECU.
-
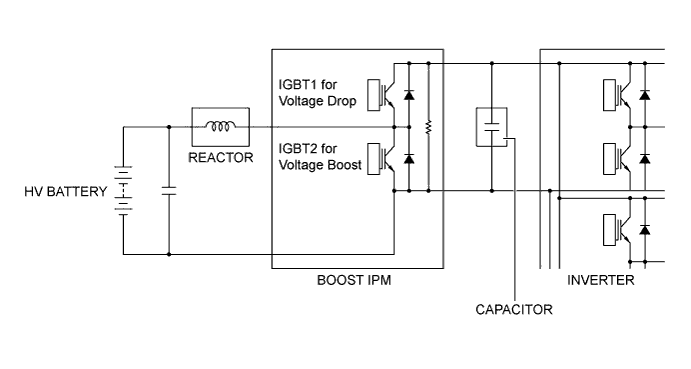
The boost converter consists of the boost IPM with built-in IGBTs that perform switching control, the reactor that stores the electrical power and generates the electromotive force, and the capacitor that charges and discharges the boosted high-voltage electricity.
-
The flow of the boost converter boosting is as described below.
Step Outline 1 The IGBT2 turns on, causing the voltage of the HV battery (nominal voltage of DC 201.6 V) to charge the reactor. As a result, the reactor stores the electrical power. 2 The IGBT2 turns off, causing the reactor to produce an electromotive force (the current continues to flow from the reactor). This electromotive force causes the voltage to rise to a maximum voltage of DC 650 V. Induced by the electromotive force that is created by the reactor, the current that is flowing from the reactor flows into the inverter and the capacitor at the boosted voltage. 3 The IGBT2 turns on again to cause the voltage of the HV battery to be charged into the reactor. For the duration, by discharging the electrical power (maximum voltage of DC 650V) stored in the capacitor, the electrical power will be supplied to the inverter. 
-
The alternating current which is generated by MG1 or MG2 for the purpose of charging the HV battery is converted into direct current (maximum voltage of DC 650 V) by the inverter. Then, the boost converter is used to drop the voltage to approximately DC 201.6 V. This is accomplished by IGBT1 being switched on and off using duty cycle control, intermittently interrupting the electrical power provided to the reactor by the inverter.
-
-
DC-DC Converter Control
-
The DC-DC converter drops the HV battery nominal voltage of DC 201.6 V to approximately DC 14 V in order to supply electricity to the electrical components, as well as to recharge the auxiliary battery.
-
In order to regulate the output voltage from the DC-DC converter, the power management control ECU (HV CPU) transmits the output voltage request signal to the DC-DC converter in response to auxiliary battery temperature sensor signals.

-
-
System Main Relay Control
-
The power management control ECU (HV CPU) controls the system main relays to connect and disconnect the high-voltage circuit from the HV battery. The power management control ECU (HV CPU) also uses the timing of the operation of the system main relays to monitor the operation of the relay contacts.
-
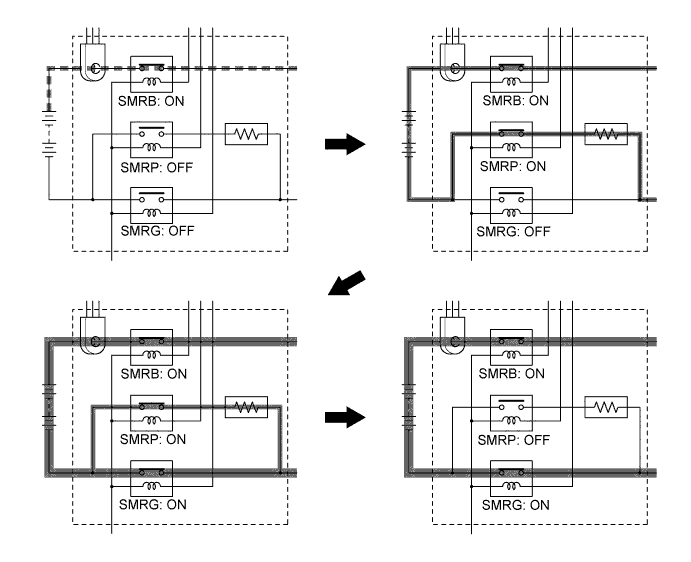
A total of 3 relays, 1 for the positive side (SMRB), and 2 for the negative side (SMRP, SMRG), are provided to ensure proper operation.

-
When the hybrid system changes to the READY-on state, the power management control ECU (HV CPU) turns on the SMRB and SMRP in sequence, and applies the current through the precharge resistor. After that, it turns the SMRG on, and applies the current by bypassing the precharge resistor. Then it turns the SMRP off. As the controlled current is initially allowed to pass through the precharge resistor in this manner, the contact point in the circuit is protected from damage that could be caused by a rush current.
-
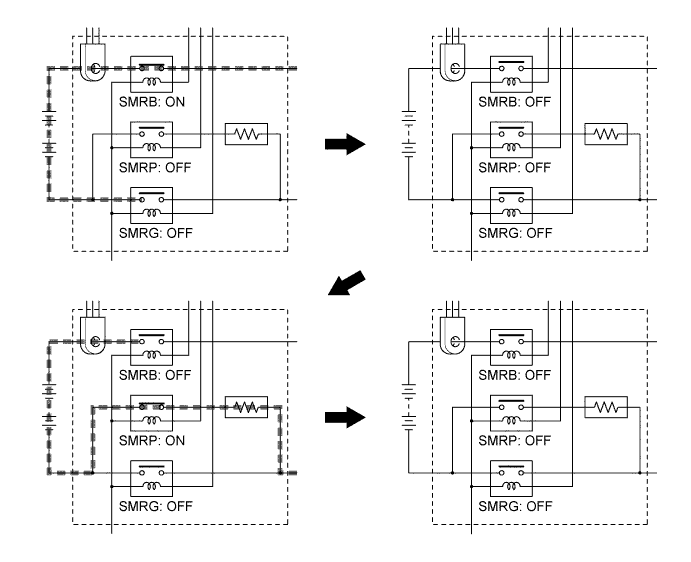
When the hybrid system changes to a state other than the READY-on state, the power management control ECU (HV CPU) turns the SMRG off first. Next, it turns the SMRB off after determining whether or not the SMRG is operating properly. After that, it turns on the SMRP and then off after determining whether or not the SMRB is operating properly. As a result, the power management control ECU (HV CPU) verifies that the respective relays have been properly turned off.
-
-
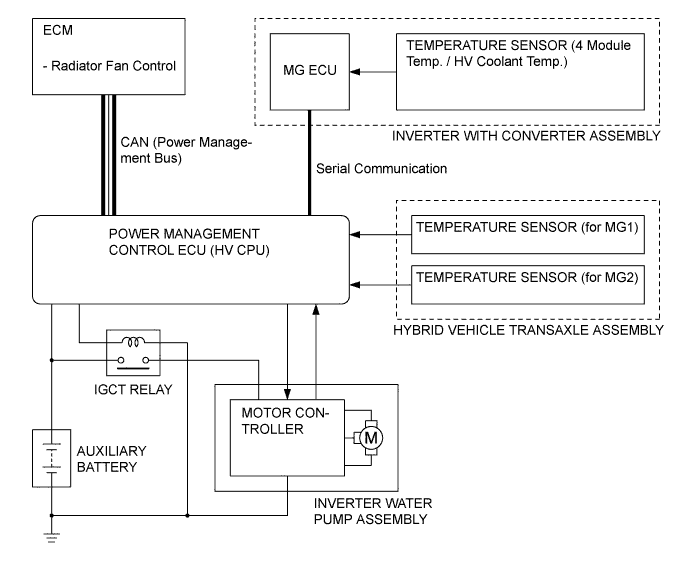
Cooling System (for Inverter with Converter Assembly and MG1) Control
-
The power management control ECU (HV CPU) receives the signals from the temperature sensor (for inverter with converter assembly), temperature sensor (for MG1) and temperature sensor (for MG2). Then, the power management control ECU (HV CPU) actuates the inverter water pump assembly over 3 levels using duty cycle control, in order to cool the inverter with converter assembly and MG1.
-
When the HV coolant temperature rises above a certain level, the power management control ECU (HV CPU) transmits a radiator fan drive request signal to the ECM. In response to that reception signal, the ECM actuates the radiator fan to restrain the HV coolant temperature increases, ensuring the cooling of the inverter with converter assembly and MG1.
-
The MG ECU converts the temperature sensor signals into digital signals, and transmits them to the power management control ECU (HV CPU) via serial communication.
-
-
Cooling System (for HV Battery) Control
-
The power management control ECU (HV CPU) receives the signals from the HV battery temperature sensor. Then, the power management control ECU (HV CPU) steplessly actuates the HV battery cooling blower using duty cycle control, in order to maintain the HV battery temperature within the specified range.
-
While the air conditioning system is operating and cooling down the cabin, and if there is any leeway in the HV battery temperature, the power management control ECU (HV CPU) turns the HV battery cooling blower off or sets it to a low speed. The purpose of this control is to give priority to cooling down the cabin. If this control is not performed, air taken from the cabin for HV battery cooling would slow the cooling of the cabin by the air conditioning system.
-
The battery smart unit converts the HV battery related signals (voltage, current and temperature) into digital signals, and transmits them to the power management control ECU (HV CPU) via serial communication. Also, the battery smart unit detects and transmits the blower speed feedback voltage which is necessary to perform the cooling system control, to the power management control ECU (HV CPU).

-
-
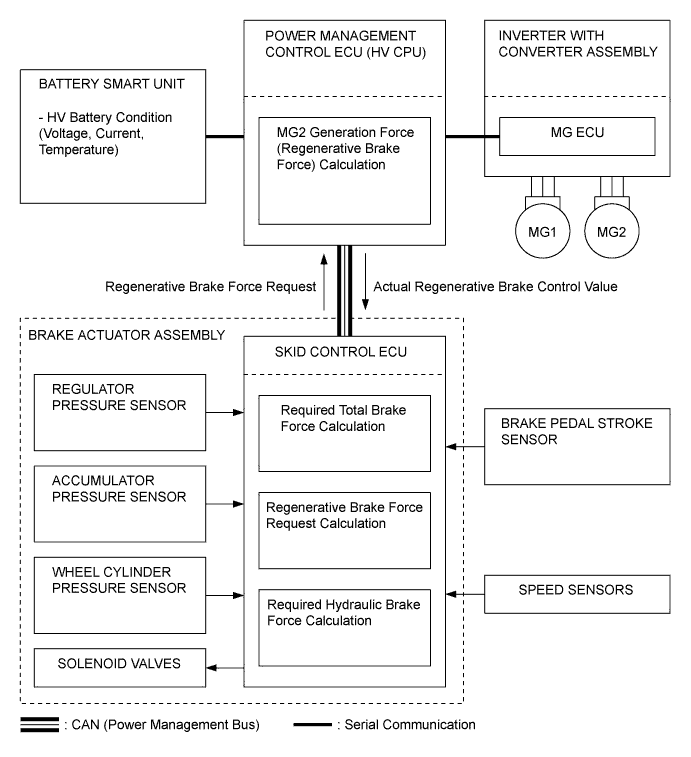
Regenerative Brake Cooperative Control
-
The skid control ECU calculates the total braking force needed based on the brake regulator pressure and brake pedal stroke when the driver depresses the brake pedal.
-
After calculating the required total braking force, the skid control ECU sends the regenerative braking force request to the power management control ECU (HV CPU). The power management control ECU (HV CPU) replies with the amount of regenerative braking force that is possible.
-
The power management control ECU (HV CPU) uses MG2 to create the minus torque (deceleration force), thus carrying out the regenerative braking.
-
The skid control ECU controls the brake actuator solenoid valves and generates the wheel cylinder pressure. The pressure that is generated is what remains after the actual regenerative brake control value has been subtracted from the required total braking force.
-
-
EV Drive Mode Control
-
EV drive mode has been provided to reduce vehicle noise, such as when entering or leaving a garage, as well as reducing the production of exhaust fumes in a garage. When the EV drive mode switch is operated by the driver, the power management control ECU (HV CPU) uses only MG2 to drive the vehicle if the operating conditions are satisfied.
-
When all operating conditions are satisfied, pressing the EV drive mode switch enters the EV drive mode, and the EV drive mode indicator light will be illuminated. If any operating condition is not satisfied and the EV drive mode switch is pressed, a message is displayed on the multi-information display to inform the driver that the EV drive mode switch operation is rejected, and the EV drive mode cannot be entered.
-
If any condition does not meet the operating conditions while the vehicle is traveling in EV drive mode, in order to inform the driver that EV drive mode will be canceled, the EV drive mode indicator light flashes 3 times and a buzzer sounds. When the EV drive mode has automatically cancelled, another message is displayed to indicate that the EV drive mode has been cancelled.
-
-
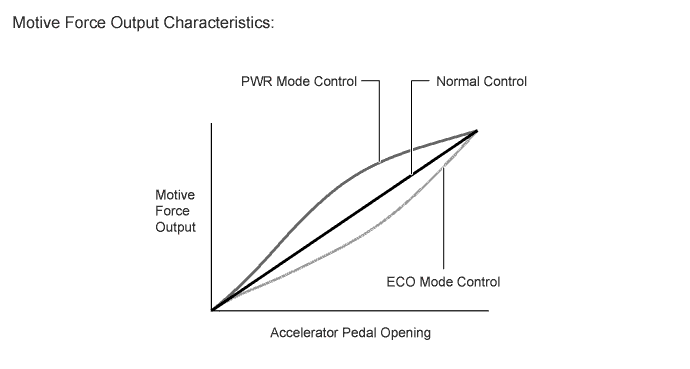
PWR Mode and ECO Mode Control
-
During PWR mode, the power management control ECU (HV CPU) optimizes acceleration performance by increasing the motive force in the acceleration pedal opening middle range more than normal.
-
During ECO mode, the power management control ECU (HV CPU) optimizes fuel economy and driving performance by gently generating the motive force against the accelerator pedal operation. At the same time, it supports Eco driving by optimizing the air conditioning performance.
-
-
-
FUNCTION
-
Message of Multi-information Display
-
The multi-information display displays messages to inform the driver when a malfunction occurs. It also displays system status and operation instructions.
-
The master warning light may illuminate or flash and the buzzer may sound depending on the message displayed on the multi-information display.
Message Message Content Explanation Master Warning Light Buzzer SHIFT TO P POSITION WHEN STARTING The shift position must be in P when activating the hybrid system. Flashes Sounds SHIFT TO P POSITION WHEN PARKED The shift position must be in P while the vehicle is stopped. Flashes Sounds LOW TRACTION BATTERY SHIFT TO P POSITION Because the SOC of the HV battery is low, stop the vehicle and then change the shift position to P. Flashes Sounds CHECK HYBRID SYSTEM Hybrid system is malfunctioning. Illuminates Sounds HYBRID SYSTEM OVERHEAT The temperatures of any parts related to the hybrid system exceed the specified value. Illuminates Sounds EV MODE NOT AVAILABLE WARMING UP EV drive mode is not available because the hybrid system is warming up. - Sounds EV MODE NOT AVAILABLE LOW BATTERY EV drive mode is not available because the HV battery SOC is low. - Sounds EV MODE NOT AVAILABLE EXCESSIVE SPEED EV drive mode is not available because the vehicle speed exceeds the operating condition. - Sounds EV MODE NOT AVAILABLE EXCESSIVE ACCEL. EV drive mode is not available because the accelerator pedal depression amount exceeds the operating condition. - Sounds EV MODE CURRENTLY NOT AVAILABLE EV drive mode is not available because other operating conditions have not been met. - Sounds EV MODE DEACTIVATED LOW BATTERY EV drive mode is deactivated because the HV battery SOC is low. -* Sounds EV MODE DEACTIVATED EXCESSIVE SPEED EV drive mode is deactivated because the vehicle speed exceeds the operating condition. -* Sounds EV MODE DEACTIVATED EXCESSIVE ACCEL. EV drive mode is deactivated because the accelerator pedal depression amount exceeds the operating condition. -* Sounds EV MODE DEACTIVATED EV drive mode is deactivated because the vehicle no longer satisfies other operating conditions. -* Sounds Tech Tips
*: The EV drive mode indicator light flashes 3 times.
-
-
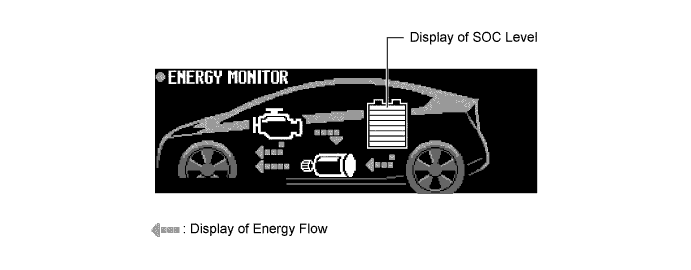
Energy Monitor
-
The energy monitor displayed in the multi-information display shows the energy flow of the hybrid system and the SOC of the HV battery based on information from the power management control ECU (HV CPU). This display shows the energy flow in the form of an arrow, and shows the SOC in 8 levels. For details, refer to Meter / Gauge System.
-
-
Hybrid System Indicator and Eco Driving Indicator Light
-
Hybrid System Indicator displayed in the multi-information display shows the hybrid system output and energy regenerative state in a bar graph indication based on information from the power management control ECU (HV CPU). The bar graph indication consists of Charge area, Eco area and Power area. Furthermore, the left part of Eco area is Hybrid Eco area that includes the vehicle driving condition in which the engine is allowed to stop.
-
When Hybrid System Indicator level indication is in Charge area or Eco area, Eco Driving Indicator Light comes on to inform of the driver that the vehicle has been driven with environment-friendly acceleration operations (Eco driving).
-
This vehicle can display a simplified hybrid system indicator in the headup display.
-
For details, refer to Meter / Gauge System.
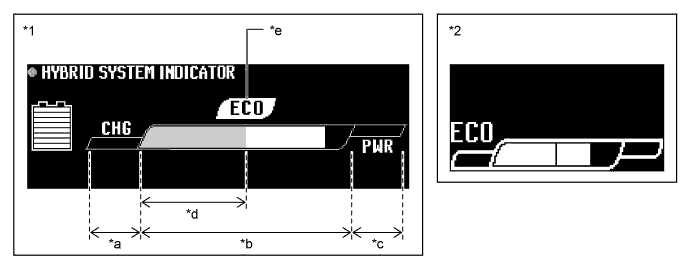
Text in Illustration *1 Multi-information Display *2 Headup Display *a Charge area *b Eco area *c Power area *d Hybrid Eco area *e Eco Driving Indicator Light - -
-
-
-
CONSTRUCTION
-
Motor Generator 1 (MG1) and Motor Generator 2 (MG2)
-
MG1 and MG2, which are built into the hybrid vehicle transaxle assembly, are compact, lightweight, and highly efficient alternating current permanent magnet motors.
-
MG1 and MG2 respectively consist of a stator, stator coil, rotor, permanent magnets, and resolver.
-
MG1 charges the HV battery and supplies electrical power to drive MG2. In addition, MG1 regulates the generated electricity to change the MG1 speed, controlling the continuously variable transmission function of the transaxle effectively. MG1 also serves as the starter to start the engine.
-
MG2 drives the drive wheels using electrical power from MG1 or the HV battery. In addition, it acts as generator when decelerating to charge the HV battery.
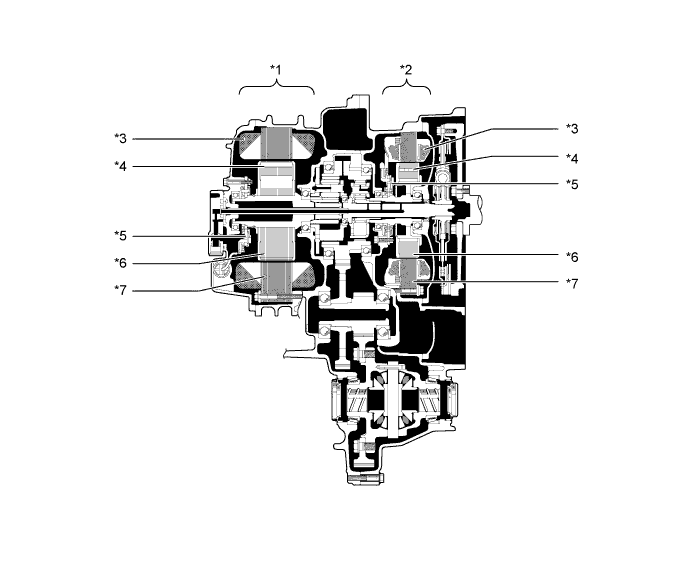
Text in Illustration *1 MG2 *2 MG1 *3 Stator Coil *4 Permanent Magnet *5 Resolver *6 Rotor *7 Stator - - -
When a three-phase alternating current is passed through the three-phase windings of the stator coil, a rotating magnetic field is created in the electric motor. By controlling this rotating magnetic field according to the rotor rotational position and speed, the permanent magnets that are provided in the rotor become attracted by the rotating magnetic field, thus generating torque.
-
The generated torque is for all practical purposes proportional to the amount of current, and the rotational speed is controlled by the frequency of the alternating current. Furthermore, a high level of torque, all the way to high speeds, can be generated efficiently by properly controlling the relationship of the rotating magnetic field to the angle of the rotor magnets.
-
When the motor is used to generate electricity, the rotation of the rotor creates a rotating magnetic field, which creates current in the phases of the stator coils.
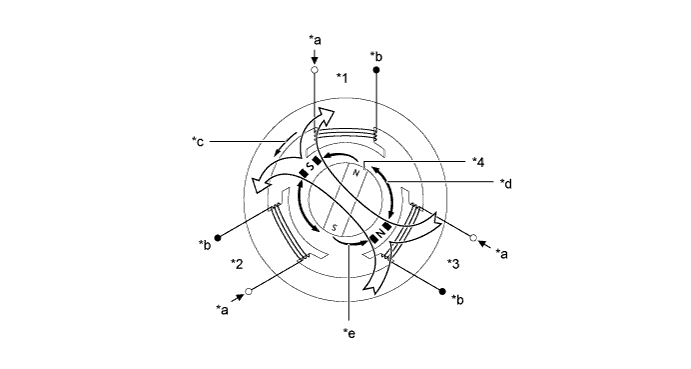
Text in Illustration *1 Stator Coil (U Phase) *2 Stator Coil (V Phase) *3 Stator Coil (W Phase) *4 Rotor (Permanent Magnet) *a from Inverter with Converter Assembly *b Connected internally in the motor *c Rotating Magnetic Field *d Repulsion *e Attraction - - 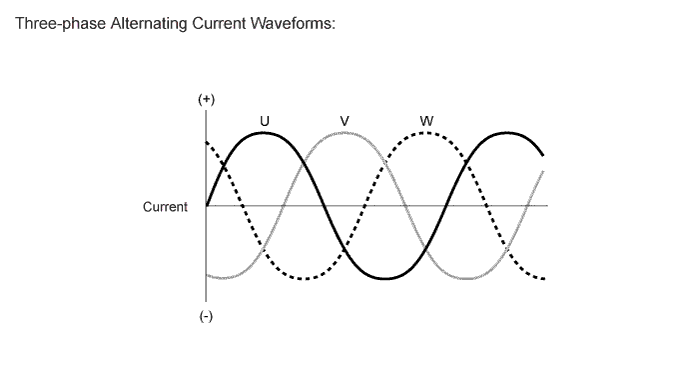
-
-
Resolver (for MG1/for MG2)
-
A resolver is an extremely reliable and compact sensor that precisely detects the magnetic pole position. Knowing the precise position of the magnetic poles of the rotor (MG1 and MG2) is indispensable for ensuring efficient control of MG1 and MG2. MG1 and MG2 each have their own resolver.
-
The stator of the resolver contains 3 types of coils: excitation coil A, detection coil S and detection coil C.
-
The rotor of the resolver is oval, the distance of the gap between the stator and the rotor varies with the rotation of the rotor.
-
The flow of an alternating current into the excitation coil A results in the creation of a constant frequency magnetic field. Using this constant frequency magnetic field, the coil S and coil C will output values that correspond to the position of the rotor. Therefore, the MG ECU detects the absolute position based on the difference between the coil S and coil C output values. Furthermore, the MG ECU calculates the rotational speed based on the amount of change in the position within a given length of time.
-
The +S and -S pairs of the detection coil S are staggered by 90 degrees. The +C and -C pairs of the detection coil C are also staggered in the same way. The S and C pairs of coils are located 45 degrees from each other.

Text in Illustration *1 +S (Detection Coil S) *2 +C (Detection Coil C) *3 -S (Detection Coil S) *4 -C (Detection Coil C) *5 Excitation Coil A *6 Rotor *a Image of Resolver Internal Construction *b Electrical Orientation of Resolver Coils *c Circuit of Detection Coil S *d Circuit of Detection Coil C -
Because the excitation coil A is provided with an alternating current at a constant frequency, a constant frequency magnetic field is output to the coils S and C, regardless of the rotor speed. The magnetic field of the excitation coil A is carried to the coils S and C by the rotor. The rotor is oval, and the gap between the stator and the rotor varies with the rotation of the rotor. Due to the variation of the gap, the peak values of the waveforms output by the coils S and C vary in accordance with the position of the rotor.
-
The MG ECU constantly monitors these peak values, and connects them to form a virtual waveform. The MG ECU calculates the absolute position of the rotor from the difference between the values of the coils S and C. It determines the rotor direction based on the difference between the phases of the virtual waveform of the coil S and the virtual waveform of the coil C. Furthermore, the MG ECU calculates the rotational speed based on the amount of change in the rotor position within a given length of time.
-
The diagrams below illustrate the waveforms that are output at coils A, S and C when the rotor makes a positive rotation of 180° from a certain position.

-
-
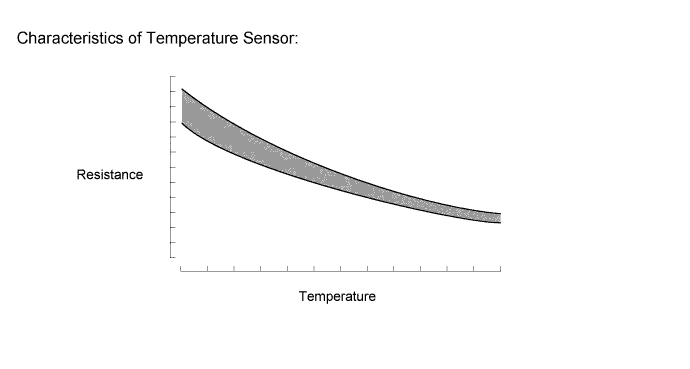
Temperature Sensor (for MG1/for MG2)
-
The temperature sensors are used to detect the temperature of the MG1 and MG2 stators.
-
The power management control ECU (HV CPU) optimally controls MG1 and MG2 according to the signals from each temperature sensor.
-
-
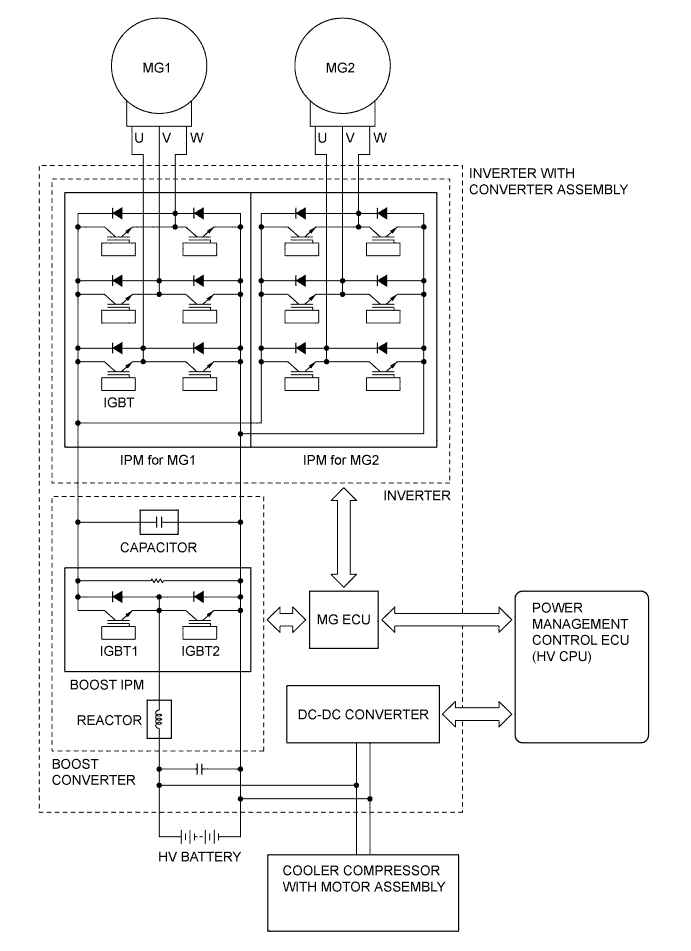
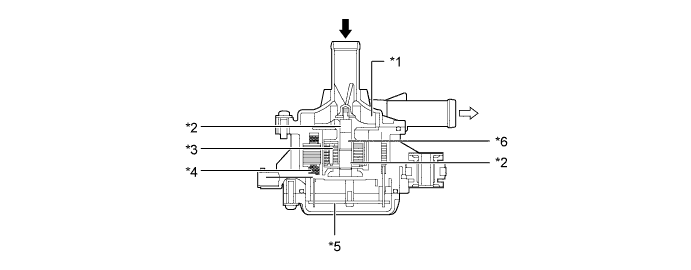
Inverter with Converter Assembly
-
A compact, lightweight inverter with converter assembly, in which the MG ECU, inverter, boost converter, and DC-DC converter are integrated, is used. The inverter and boost converter primarily consist of Intelligent Power Modules (IPMs), a reactor, and capacitor. The IPM is an integrated power module consisting of a signal processor, protective function processor, and Insulated Gate Bipolar Transistors (IGBTs).
-
The inverter with converter assembly ensures heat dissipation through use of a water-cooled cooling system that is isolated from the engine cooling system.
-
As a safety measure because of the high-voltage, interlock switches are provided, which shut off the system main relays via the power management control ECU (HV CPU) when the inverter terminal cover is removed, or the HV battery power cable connector is disconnected.
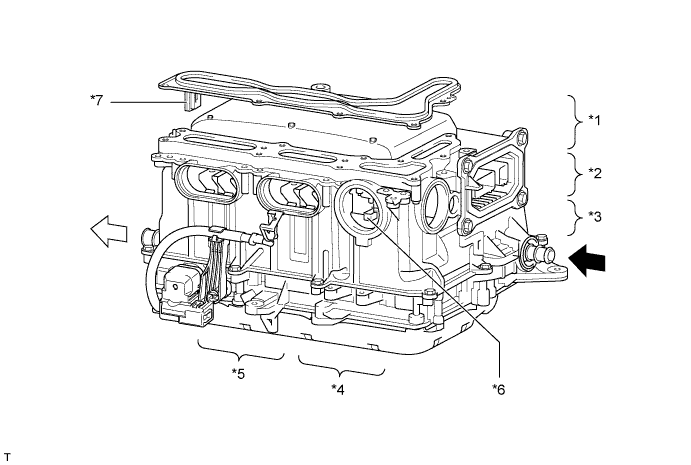
Text in Illustration *1 Capacitor *2 MG ECU *3 Intelligent Power Modules (IPMs) *4 Reactor *5 DC-DC Converter *6 Interlock Switch (for Power Cable Connector) *7 Interlock Switch (for Inverter Terminal Cover) - - 
HV Coolant Inlet 
HV Coolant Outlet -
The inverter employs an IPM that performs switching control. Each IPM of the MG1 and MG2 have a bridge circuit that consists of 6 IGBTs.
-
The boost converter consists of a boost IPM that performs switching control, a reactor that acts as an inductor, and a capacitor that accumulates and stores electricity. The boost IPM has IGBT2 for boosting voltage, and IGBT1 for reducing voltage.
-
-
MG ECU
-
The MG ECU is provided in the inverter with converter assembly. In accordance with the signals received from the power management control ECU (HV CPU), the MG ECU controls the inverter and boost converter in order to drive MG1 or MG2 or cause them to generate electricity.
-
The MG ECU transmits information that is required for vehicle control, such as the atmospheric pressure, inverter temperature and any failure information, to the power management control ECU (HV CPU). It receives information that is required for controlling MG1 and MG2, such as the required motive force and the temperature of MG1 and MG2, from the power management control ECU (HV CPU).
-
-
Atmospheric Pressure Sensor
-
The atmospheric pressure sensor is provided on the MG ECU board.
-
This sensor detects the atmospheric pressure and transmits a signal to the MG ECU to allow corrections that correspond to the usage environment.
-
-
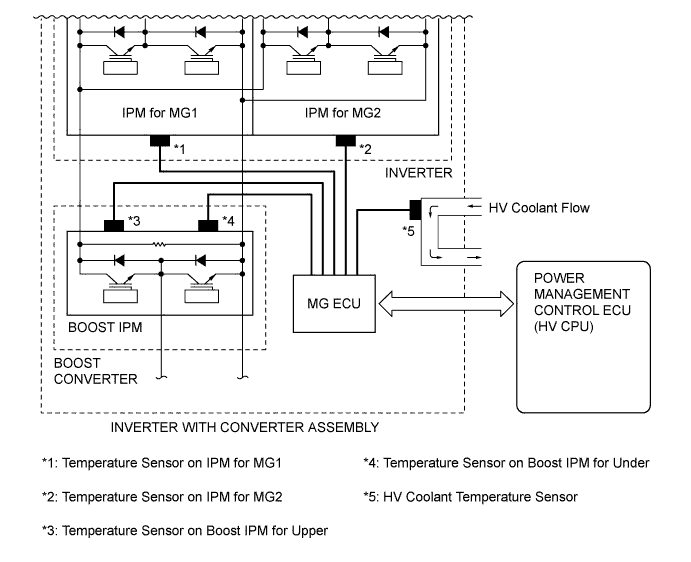
Temperature Sensor (for Inverter with Converter Assembly)
-
A temperature sensor (for inverter with converter assembly) consists of 5 different temperature sensors; 2 of them are located at the IPMs for MG1 and MG2, 2 of them are located at the boost converter, and the remaining sensor is located at the HV coolant passage.
-
The temperature sensor (for inverter with converter assembly) detects the temperatures at areas inside the inverter with converter assembly, and transmits that temperature information to the power management control ECU (HV CPU) via the MG ECU. The power management control ECU (HV CPU) optimizes the cooling system according to the temperature information, maintaining the output performance of the inverter with converter assembly.
-
-
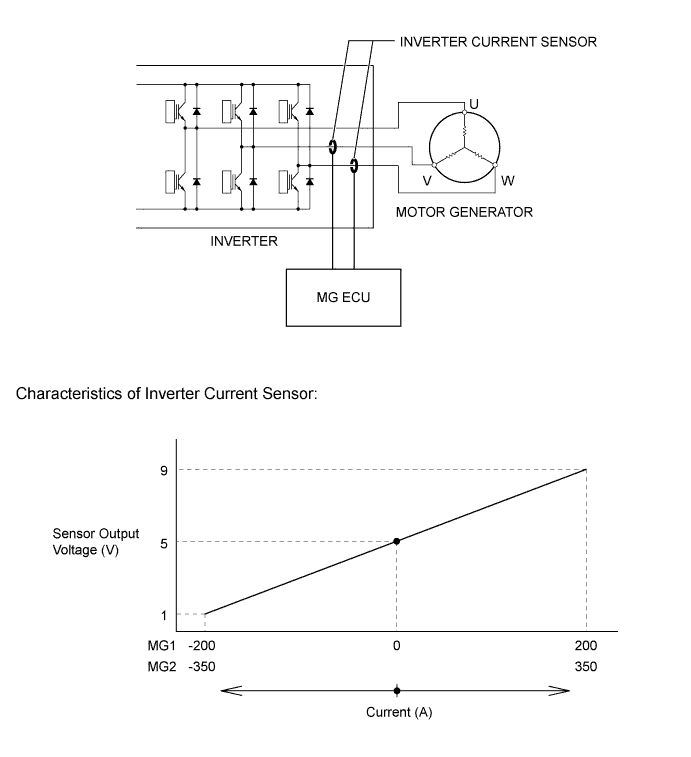
Inverter Current Sensor
-
The inverter current sensor detects the amperage of the three-phase alternating current that actuate MG1 and MG2. This actual amperage is used as feedback by the MG ECU.
-
For this sensor, among the three-phase windings of each of MG1 and MG2, current sensors are set in the V and W phase windings in the inverter with converter assembly. Current that flows through the U phase winding flows through the V phase or W phase winding, thus the U phase amperage can be measured even if the current sensor is not set in the U phase winding.
-
-
HV Battery Assembly
-
The HV battery assembly mainly consists of the HV battery, HV battery temperature sensor, hybrid battery junction block assembly, HV battery cooling blower, battery smart unit and service plug grip.
-
The HV battery use nickel-plated, metal container type cells to provide enhanced cooling performance and a compact construction. As a result, high power density, lightweight construction, and longevity have been accomplished at high levels.
-
The HV battery cooling blower is used as a dedicated cooling system to ensure that the HV battery performs properly, despite it generating significant heat during the repetitive charge and discharge cycles.
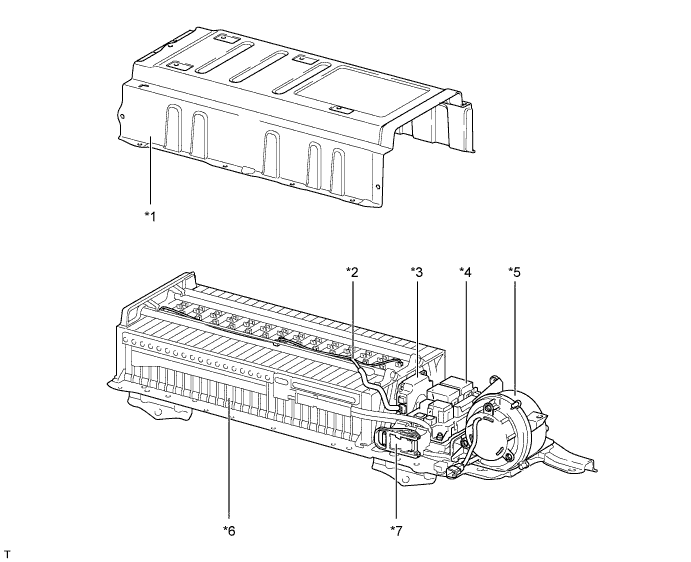
Text in Illustration *1 HV Battery Upper Cover *2 HV Battery Temperature Sensor *3 Battery Smart Unit *4 Hybrid Battery Junction Block Assembly *5 HV Battery Cooling Blower *6 HV Battery (Battery Modules) *7 Service Plug Grip - - -
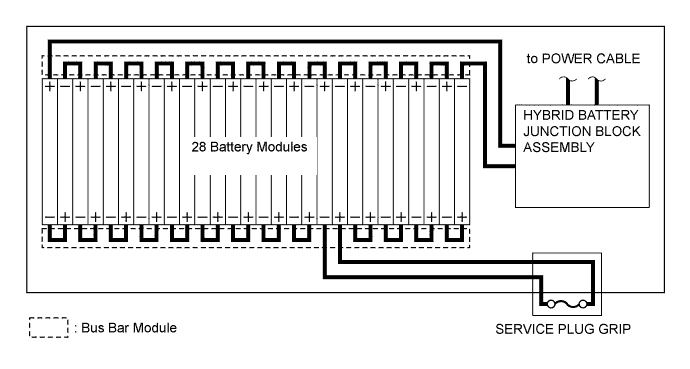
The HV battery consists of 28 separate battery modules and they are connected to each other in series through 2 bus bar modules.
-
These battery modules each comprise 6 cells. The HV battery, which has a total of 168 cells (6 cells x 28 modules) and a nominal voltage of 201.6 V (1.2 V x 168 cells), is located in the luggage compartment behind the rear seat.
-
-
HV Battery Temperature Sensor
-
A HV battery temperature sensor consists of 4 temperature sensors; 3 of them are fitted on the battery modules and the remaining one is provided on the intake air duct.
-
The power management control ECU (HV CPU) optimally controls the cooling system so that the HV battery temperature can be within a specified range according to the temperature information that is received via the battery smart unit.
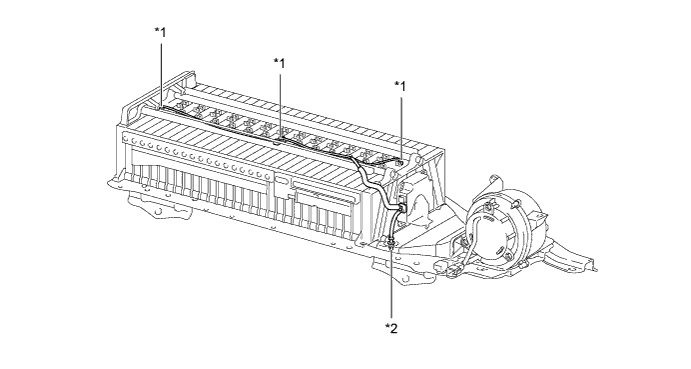
Text in Illustration *1 HV Battery Temperature Sensor (for Battery Module) *2 HV Battery Temperature Sensor (for Intake Air Duct)
-
-
Hybrid Battery Junction Block Assembly
-
The hybrid battery junction block assembly consists of the System Main Relays (SMRs), precharge resistor and HV battery current sensor.
-
The SMRs are the relays that connect and disconnect the HV battery and power cable in accordance with the signal from the power management control ECU (HV CPU), and 3 types of relays are provided; SMRB for the battery positive (+) side, SMRG for the battery negative (-) side, and SMRP for pre-charging.
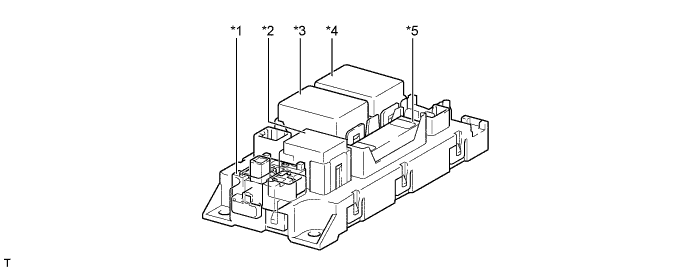
Text in Illustration *1 HV Battery Current Sensor *2 SMRP *3 SMRG *4 SMRB *5 Precharge Resistor - -
-
-
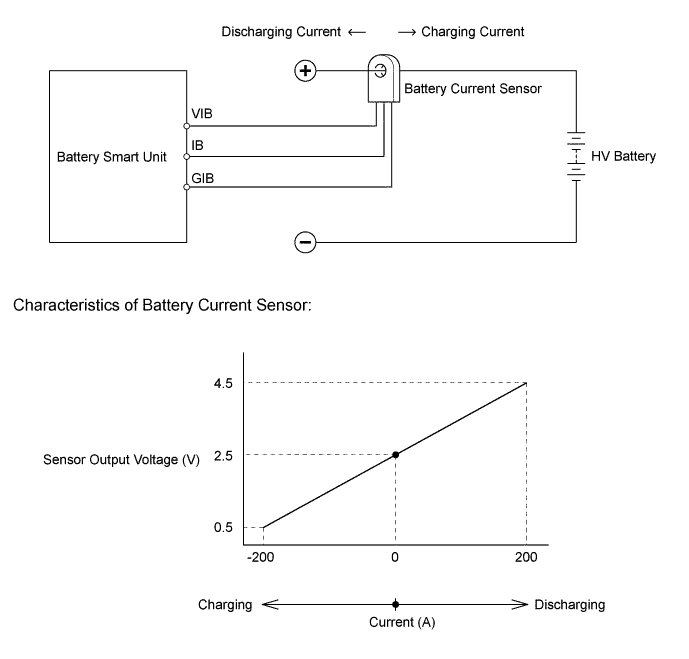
HV Battery Current Sensor
-
A HV battery current sensor, which is built into the hybrid battery junction block assembly, is used to detect the HV battery charging and discharged amperage.
-
The power management control ECU (HV CPU) optimally controls the hybrid system so that the SOC of the HV battery can always be within a specified range according to the amperage information that is received via the battery smart unit.
-
-
Battery Smart Unit
-
The battery smart unit monitors the conditions of the HV battery such as voltage, current and temperature, and transmits this information to the power management control ECU (HV CPU).
-
Also, the battery smart unit detects and transmits the blower speed feedback voltage which is necessary to perform the cooling system control, to the power management control ECU (HV CPU).
-
A leakage detection circuit is provided in the battery smart unit in order to detect any electrical leakage from the HV battery or high-voltage circuit.
-
The battery smart unit converts these signals into digital signals and transmits them to the power management control ECU (HV CPU) via serial communication.
-
-
Service Plug Grip
-
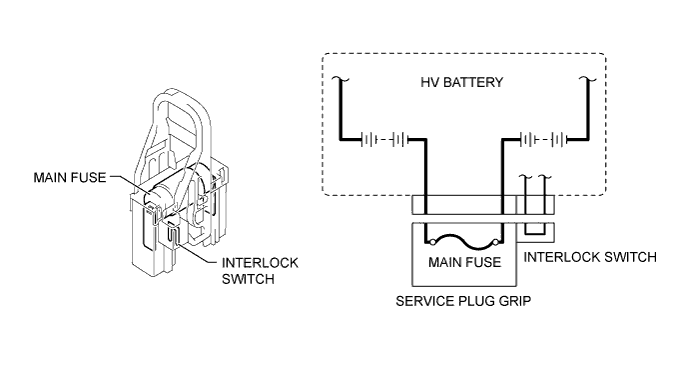
The service plug grip is connected to the middle of the battery module circuit and is used for manually shutting off the high-voltage circuit. This ensures safety during service.
-
The main fuse for the high-voltage circuit is provided inside of the service plug grip.
-
An interlock switch has been provided on the service plug grip. When the grip section is unlocked, the interlock switch is turned off and the power management control ECU (HV CPU) shuts off the system main relays. However, to ensure safety, make sure to turn the power switch off before removing the service plug grip.
CAUTION:
For further details on how to handle the service plug grip and other safety cautions, refer to the Repair Manual.
-
-
Power Cable
-
The power cable is a set of high-voltage, high-amperage cables that connect the HV battery with the inverter with converter assembly, the inverter with converter assembly with MG1 and MG2, and the inverter with converter assembly with the cooler compressor with motor assembly.
-
The power cable is made of shielded cables in order to reduce electromagnetic interference.
-
For identification purposes, the high-voltage wiring harness and connectors are color-coded orange to distinguish them from those of the ordinary low-voltage wiring.
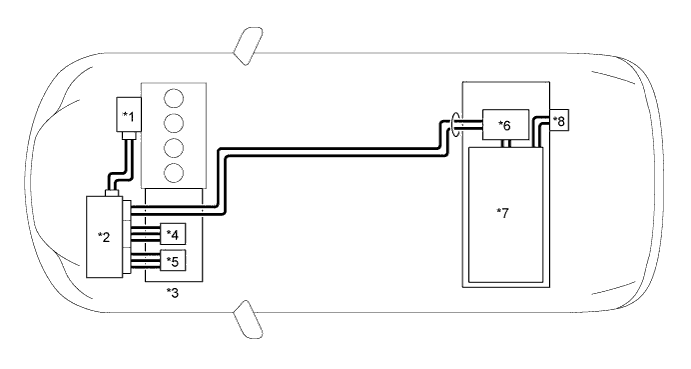
Text in Illustration *1 Cooler Compressor with Motor Assembly *2 Inverter with Converter Assembly *3 Hybrid Vehicle Transaxle Assembly *4 MG1 *5 MG2 *6 Hybrid Battery Junction Block Assembly *7 HV Battery *8 Service Plug Grip 
Power Cable - -
-
-
Inverter Water Pump Assembly
-
The compact and highly efficient electric type inverter water pump assembly is used.
-
The high output brushless type motor is used for the pump motor, furthermore, bearings that supports the shaft at both ends are employed, thus suppressing noise and vibration.
-
The pump motor is controlled over 3 levels by the duty cycle signal from the power management control ECU (HV CPU).
Text in Illustration *1 Impeller *2 Bearing *3 Magnet *4 Coil *5 Motor Controller *6 Shaft HV Coolant Inlet HV Coolant Outlet
-
-
HV Battery Cooling Blower
-
The compact and highly efficient HV battery cooling blower is used.
-
A high output brushless type motor is used for the blower motor, and the inner shape of the blower case has been optimized. As a result, blower noise is reduced.
-
The blower motor has a built-in motor controller, and is controlled in a variable manner by the duty cycle signal from the power management control ECU (HV CPU).
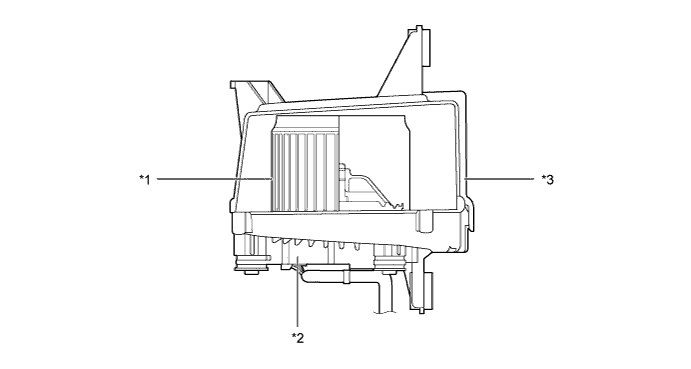
Text in Illustration *1 Blower Fan *2 Blower Motor *3 Blower Case - -
-
-
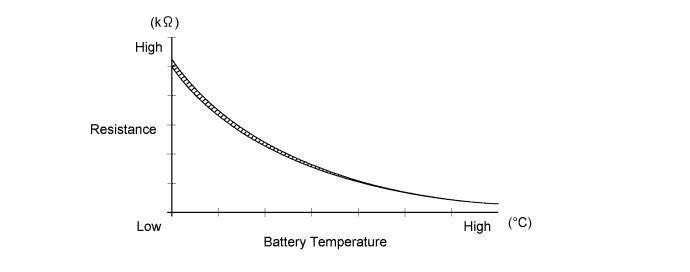
Auxiliary Battery Temperature Sensor
-
The auxiliary battery temperature sensor detects the auxiliary battery temperature, and transmits temperature signals to the power management control ECU (HV CPU).
-
Based on the signal from the sensor, in order to maintain the optimal charging state appropriate to the auxiliary battery temperature, the power management control ECU (HV CPU) regulates the output voltage from the DC-DC converter.
-
-
Accelerator Pedal Position Sensor
-
The non-contact type accelerator pedal position sensor uses a Hall IC.
-
A magnetic yoke is mounted at the base of the accelerator pedal arm. This yoke rotates around the Hall IC in accordance with the amount of effort that is applied to the accelerator pedal. The Hall IC converts the changes in the magnetic flux that occur into electrical signals, and outputs accelerator pedal position signals to the power management control ECU (HV CPU).
-
The Hall IC contains 2 circuits, one for the main signal, and one for the sub signal. It converts the accelerator pedal position (angle) into electric signals that have differing characteristics and outputs them to the power management control ECU (HV CPU).
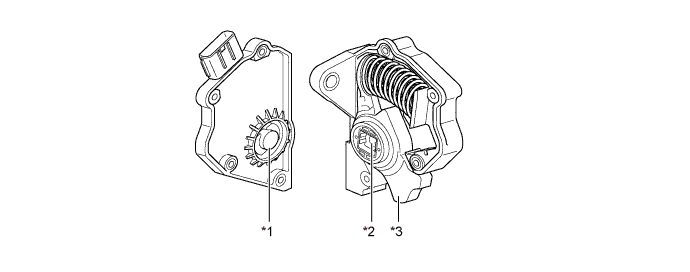
Text in Illustration *1 Hall IC *2 Magnetic Yoke *3 Accelerator Pedal Arm - - 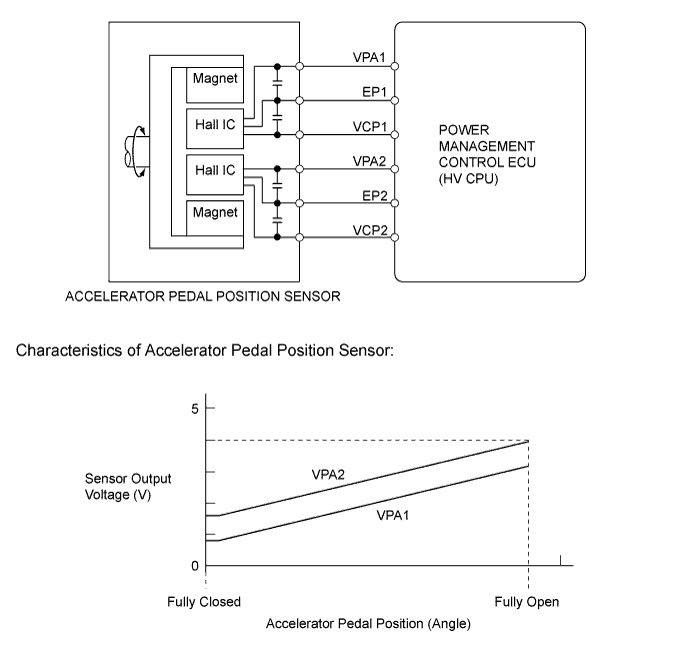
-
-
-
OPERATION
-
Operation of Hybrid Vehicle
-
The hybrid system uses motive force provided by the engine and MG2, and it uses MG1 as a generator. The system optimally combines these forces in accordance with various driving conditions.
-
The power management control ECU (HV CPU) constantly monitors the engine coolant temperature, SOC, HV battery temperature and electrical load conditions. If any of the monitoring conditions fails to satisfy the requirements, and when the vehicle is in the READY-on state and the shift position is any positions other than N, the power management control ECU (HV CPU) starts the engine.
-
The hybrid system drives the vehicle by optimally combining the operations of the engine, MG1 and MG2 in accordance with the driving conditions listed below. The vehicle conditions listed below are examples of typical vehicle driving conditions.
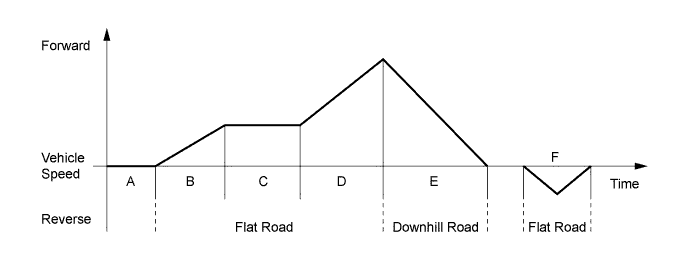
Driving Condition A READY-on State B Starting Off C Constant-speed Cruising D During Full Throttle Acceleration E During Deceleration F During Reverse Driving
-
-
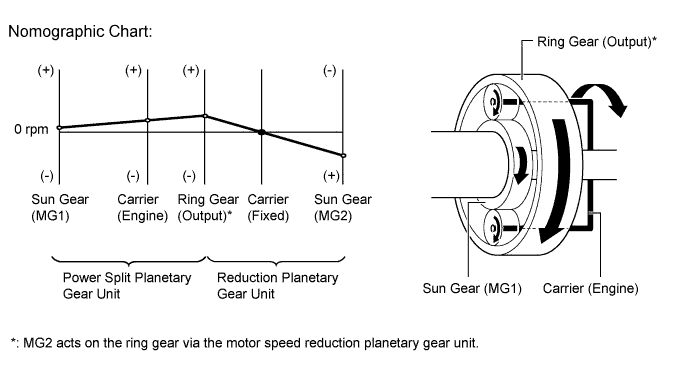
How to Read a Nomographic Chart
-
The nomographic chart below gives a visual representation of the planetary gear rotation direction, rotational speed and torque balance.
-
In the nomographic chart, a straight line is used to represent the relationship between the rotation directions and rotational speeds of the 3 gears in the planetary gear. The rotational speed of each gear is indicated by the distance from the 0 rpm point. Due to the structure of the planetary gear, the relationship between the rotational speeds of the 3 gears is always expressed by a straight line.
-
The nomographic charts and the illustrations of the geartrain operation for each vehicle driving condition shown on the following descriptions are examples only. The examples shown are 'snapshots', normal system operation is a constantly changing blend of conditions and system reactions to suit those conditions.
-
For the hybrid system, motor generators have different roles depending on the situation. Understanding the relationship between the rotation direction and torque can help to make the role of a motor generator easier to understand.
-
The table below shows the relationship of drive and electric generation for different combinations of plus or minus torque and forward or reverse rotation.
Rotation Direction Torque Condition Role of Component Forward (+) Rotation Plus Torque Drive Minus Torque Electric Generation Reverse (-) Rotation Plus Torque Electric Generation Minus Torque Drive -
As an example, if a motor generator is rotating in the forward (+) direction, and it applies minus torque, it will generate electricity (producing electrical power).
-
Alternately, if the motor generator is rotating in the reverse (-) direction and it applies minus torque, it will act as a drive source (consuming electrical power).
-
-
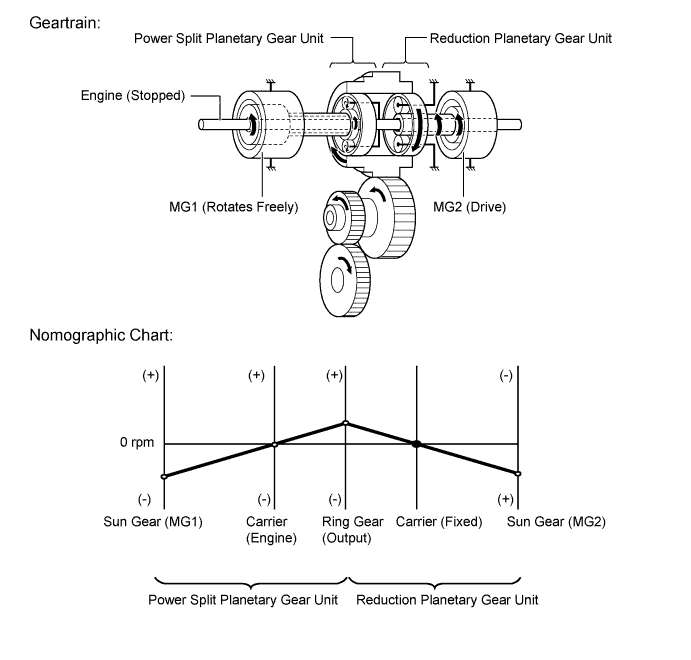
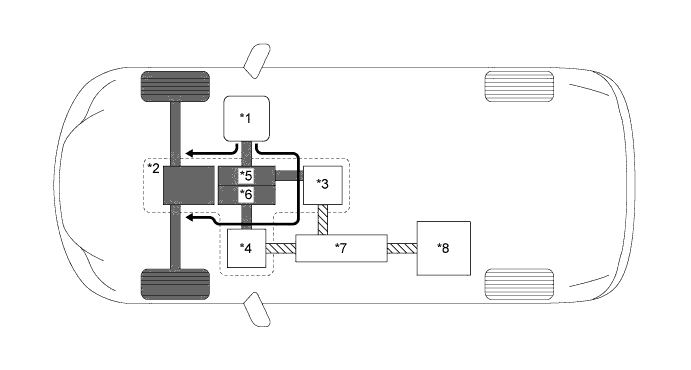
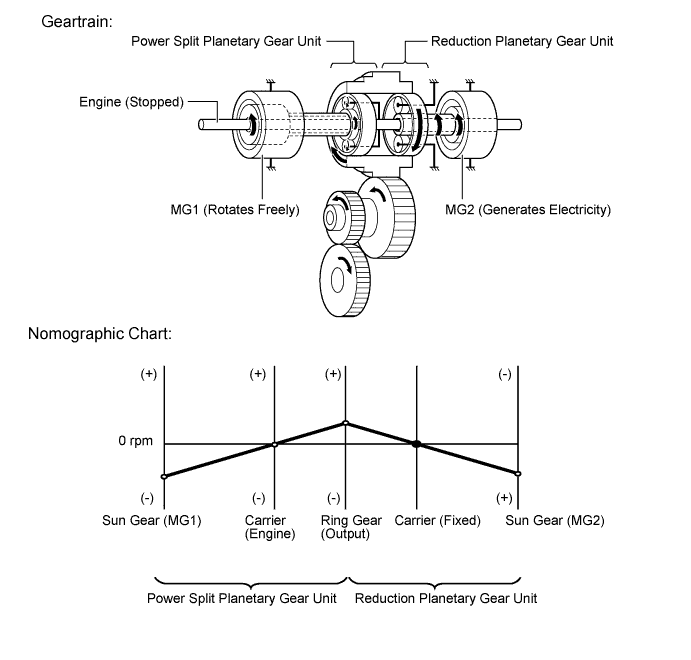
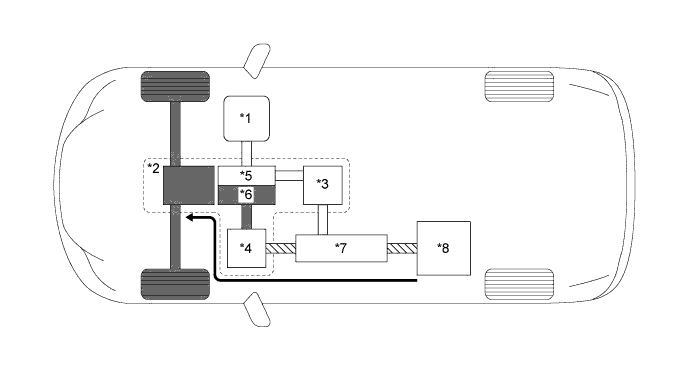
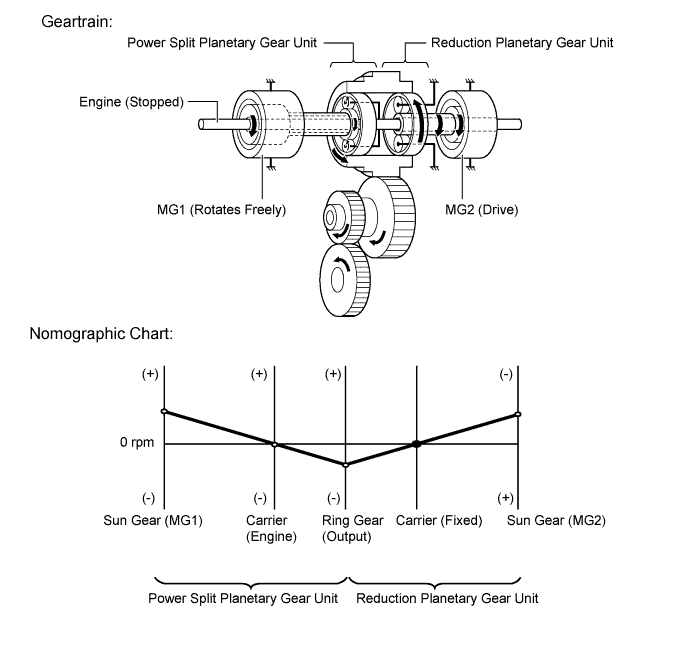
Driving Condition B: Starting Off
-
When the vehicle is started off, the vehicle operates powered by MG2. If the required drive torque increases when running with MG2 only, MG1 is activated to start the engine.
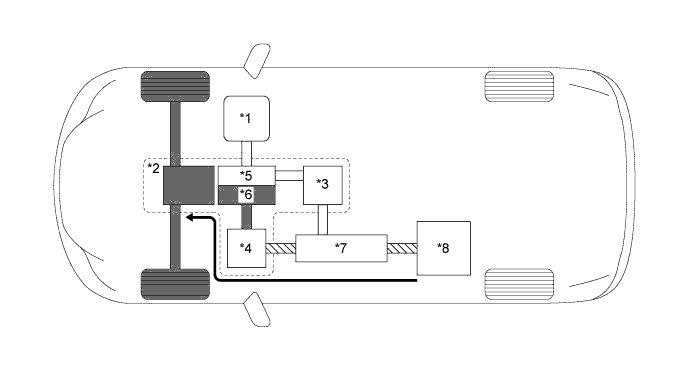
Text in Illustration *1 Engine (Stopped) *2 Hybrid Vehicle Transaxle Assembly *3 MG1 (Rotates Freely) *4 MG2 (Drive) *5 Power Split Planetary Gear Unit *6 Motor Speed Reduction Planetary Gear Unit *7 Inverter with Converter Assembly *8 HV Battery 
Mechanical Power Path 
Electrical Power Path Power Transmission - - -
When the vehicle starts off under normal conditions, it runs using the motive force of MG2. While running under this condition, the rotational speed of the carrier (engine) is 0 rpm due to the engine being stopped. In addition, since MG1 does not generate any torque, no torque acts on the sun gear (MG1). However, the sun gear rotates freely in the (-) direction balancing the rotating ring gear.
-
-
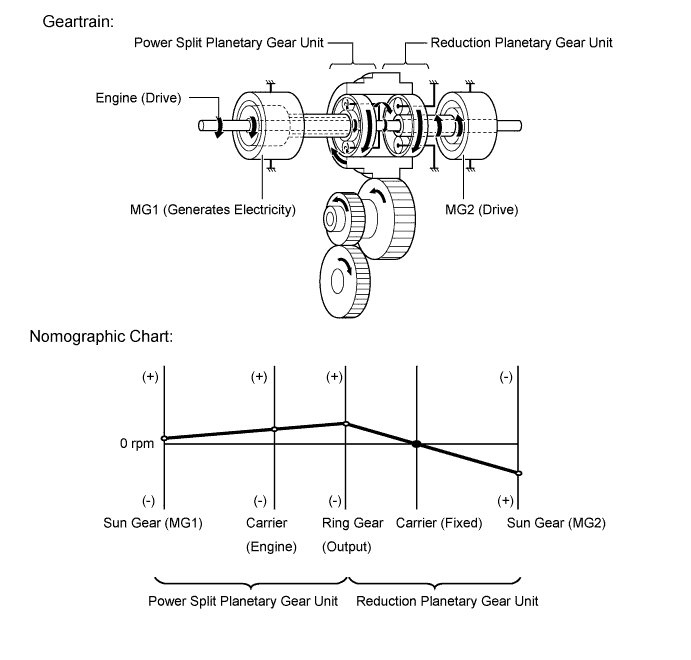
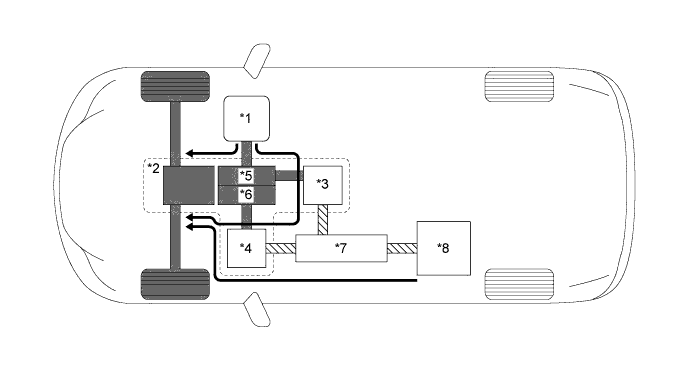
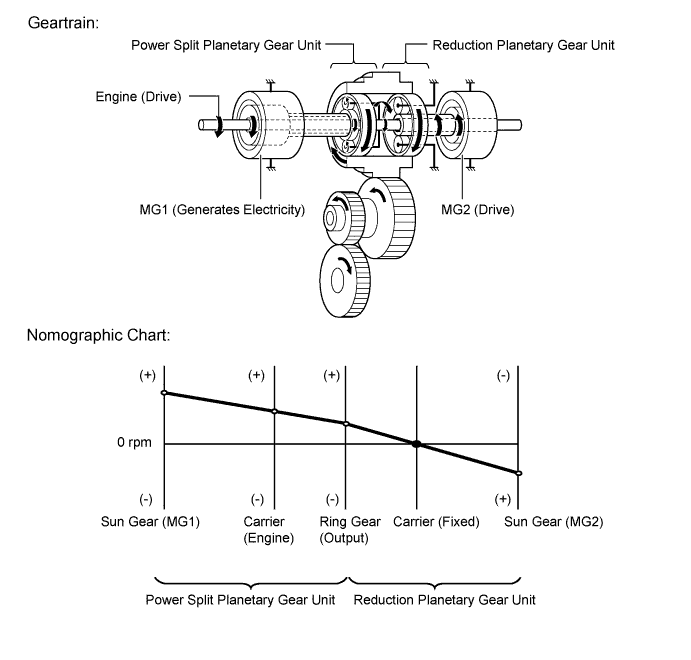
Driving Condition C: Constant-speed Cruising
-
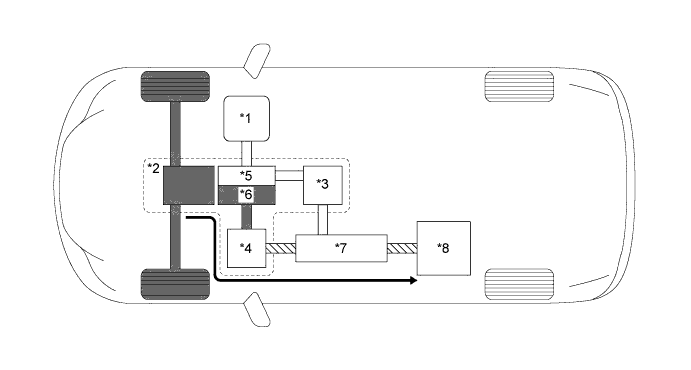
When the vehicle is running under low load and constant-speed cruising, the motive force of the engine is transmitted by the power split planetary gear unit. Some of this motive force is output directly, and the remaining motive force is used for generating electricity through MG1. Through the use of the electrical power path of an inverter, this electrical power is transmitted to MG2 to be output as the motive force of MG2. If the SOC level of the HV battery is low, it is charged by MG1 driven by the engine.
Text in Illustration *1 Engine (Drive) *2 Hybrid Vehicle Transaxle Assembly *3 MG1 (Generates Electricity) *4 MG2 (Drive) *5 Power Split Planetary Gear Unit *6 Motor Speed Reduction Planetary Gear Unit *7 Inverter with Converter Assembly *8 HV Battery Mechanical Power Path Electrical Power Path Power Transmission - - -
The torque from the engine acts on the carrier (engine) in the (+) direction, causing the sun gear (MG1) to react in the minus torque. MG1 generates electricity by harnessing the minus torque that acts on the sun gear (MG1).
-
-
Driving Condition D: During Full Throttle Acceleration
-
When the vehicle driving condition changes from low load cruising to full-throttle acceleration, the system supplements the motive force of MG2 with electrical power from the HV battery.
Text in Illustration *1 Engine (Drive) *2 Hybrid Vehicle Transaxle Assembly *3 MG1 (Generates Electricity) *4 MG2 (Drive) *5 Power Split Planetary Gear Unit *6 Motor Speed Reduction Planetary Gear Unit *7 Inverter with Converter Assembly *8 HV Battery Mechanical Power Path Electrical Power Path Power Transmission - - -
When more engine power is required, in order to increase the engine speed, the rotational speeds of the related gears change as follows. The torque from the engine acts on the carrier (engine) in the (+) direction, causing the sun gear (MG1) to react in the minus torque. MG1 generates electricity by harnessing the minus torque that acts on the sun gear (MG1).
-
-
Driving Condition E: During Deceleration
-
While the vehicle is decelerated with the shift position in D, the engine is turned off and the motive force changes to zero. At this time, the wheels drive MG2, causing MG2 to operate as a generator, charging the HV battery. If the vehicle decelerates from a higher speed, the engine maintains a predetermined speed without stopping, in order to protect the planetary gears.
Text in Illustration *1 Engine (Stopped) *2 Hybrid Vehicle Transaxle Assembly *3 MG1 (Rotates Freely) *4 MG2 (Generates Electricity) *5 Power Split Planetary Gear Unit *6 Motor Speed Reduction Planetary Gear Unit *7 Inverter with Converter Assembly *8 HV Battery Mechanical Power Path Electrical Power Path Power Transmission - - -
During deceleration, the ring gear is rotated by the wheels. Under this condition, due to the engine being stopped, the rotational speed of the carrier (engine) is 0 rpm. In addition, since MG1 does not generate any torque, no torque acts on the sun gear (MG1). However, the sun gear (MG1) rotates freely in the (-) direction balancing the rotating ring gear.
-
-
Driving Condition F: During Reverse Driving
-
When the vehicle is being driven in reverse, the required power is supplied by MG2. At this time, MG2 rotates in the opposite direction, the engine remains stopped, and MG1 rotates in the normal direction without generating electricity.
Text in Illustration *1 Engine (Stopped) *2 Hybrid Vehicle Transaxle Assembly *3 MG1 (Rotates Freely) *4 MG2 (Drive) *5 Power Split Planetary Gear Unit *6 Motor Speed Reduction Planetary Gear Unit *7 Inverter with Converter Assembly *8 HV Battery Mechanical Power Path Electrical Power Path Power Transmission - - -
The conditions of the planetary gear are opposite to those described in "Starting Off". Due to the engine being stopped, the rotational speed of the carrier (engine) is 0 rpm but the sun gear (MG1) rotates freely in the (+) direction balancing the rotating ring gear.
-
-
-
DIAGNOSIS
-
When the power management control ECU (HV CPU) detects a malfunction in the hybrid system, the power management control ECU (HV CPU) performs a diagnosis and memorizes the failed section. To inform the driver of the malfunction, the power management control ECU (HV CPU) illuminates or blinks the check engine warning light, master warning light and displays a message in the multi-information display. At the same time, the Diagnostic Trouble Code (DTC) is stored in its memory.
-
3-digit information codes (INF codes) have been provided with the conventional DTC as subset of the primary 5-digit code. This enables the troubleshooting procedure to further narrow down a trouble area to identify a problem.
-
The DTC can be read by connecting the Intelligent Tester to the DLC3. For details, refer to the Repair Manual.
-