PRE-CRASH SAFETY SYSTEM TERMINALS OF ECU

-
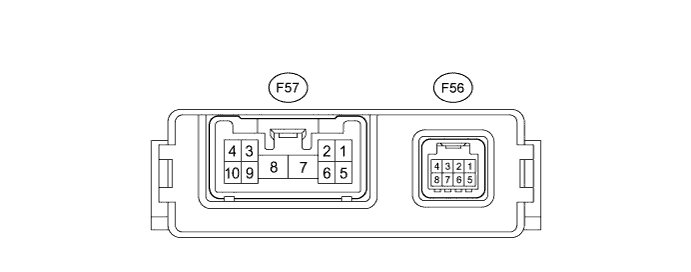
CHECK SEAT BELT CONTROL ECU
-
Disconnect the seat belt control ECU connectors.
-
Measure the resistance and voltage according to the value(s) in the table below.
Terminal No. (Symbol) Wiring Color Terminal Description Condition Specified Condition F57-7 (+B) - Body ground B - Body ground Battery voltage Always 11 to 14 V F57-8 (PGND) - Body ground W-B - Body ground Body ground Always Below 1 Ω F56-8 (IG1) - Body ground Y - Body ground Seat belt control ECU power supply Engine switch on (IG) 11 to 14 V Engine switch off Below 1 V If the result is not as specified, there may be a malfunction on the wire harness side.
-
Reconnect the connectors.
-
Measure the resistance and voltage according to the value(s) in the table below.
Terminal No. (Symbol) Wiring Color Terminal Description Condition Specified Condition F57-2 (MOR+) - F57-1 (MOR-) R - GR Seat belt motor RH power supply Engine switch on (IG) 4.0 to 8.5 V Engine switch off Below 1 V F57-3 (MOL+) - F57-4 (MOL-) L - V Seat belt motor LH power supply Engine switch on (IG) 4.0 to 8.5 V Engine switch off Below 1 V F56-5 (PBK+) - Body ground L - Body ground Front seat inner belt assembly line
-
Engine switch on (IG)
-
Fasten passenger side seat belt
Pulse generation
(see waveform 1)
F56-6 (PBK-) - Body ground P - Body ground Front seat inner belt assembly line
-
Always
Below 1 Ω If the result is not as specified, the seat belt control ECU may be malfunctioning.
-
-
Inspect using an oscilloscope.
-
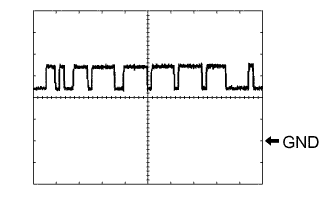
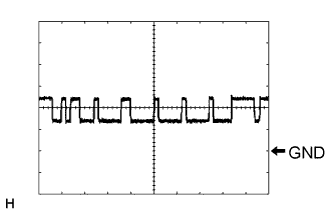
Waveform 1 (Reference)
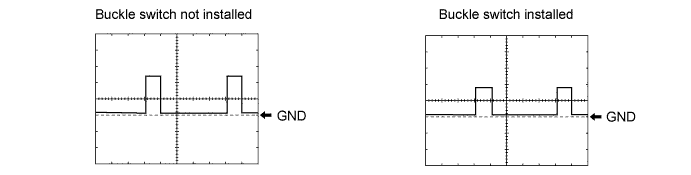
Terminal F56-5 (PBK+) - Body ground Tool Setting 2V/DIV., 20 ms./DIV. Condition Engine switch on (IG), buckle switches are not installed Engine switch on (IG), buckle switches are installed
-
-
-
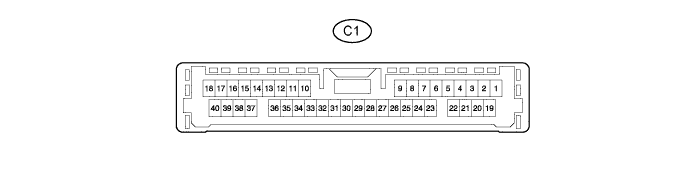
CHECK DRIVING SUPPORT ECU
-
Disconnect the driving support ECU connector.
-
Measure the voltage and resistance according to the value(s) in the table below.
Terminal No. (Symbol) Wiring Color Terminal Description Condition Specified Condition C1-30 (B) - Body ground P - Body ground Power supply Engine switch on (IG) 11 to 14 V Engine switch off Below 1 V C1-25 (GND) - Body ground W-B - Body ground Body ground Always Below 1 Ω -
Connect the driving support ECU connector.
-
Turn the engine switch on (IG).
-
Measure the voltage according to the value(s) in the table below.
Terminal No. (Symbol) Wiring Color Terminal Description Condition Specified Condition C1-7 (MODE) - Body ground Y - Body ground MODE signal
-
-Engine switch on (IG)
-
-MODE switch OFF
11 to 14 V
-
-Engine switch on (IG)
-
-MODE switch ON
Below 1 V C1-32 (WIP2) - Body ground SB - Body ground Wiper signal
-
-Engine switch on (IG)
-
-Wiper switch OFF
Below 1 V
-
-Engine switch on (IG)
-
-Wiper switch ON
11 to 14 V C1-18 (CA1N) - C1-25 (GND) L - W-B CAN communication signal Engine switch on (IG) Pulse generation
(see waveform 1)
C1-40 (CA1P) - C1-25 (GND) B - W-B Driving support ECU communication signal Engine switch on (IG) Pulse generation
(see waveform 2)
C1-39 (CA2H) - C1-25 (GND) B - W-B CAN communication signal Engine switch on (IG) Pulse generation
(see waveform 3)
C1-17 (CA2L) - C1-25 (GND) W - W-B CAN communication signal Engine switch on (IG) Pulse generation
(see waveform 4)
If the result is not as specified, there may be a malfunction on the wire harness side.
-
-
Waveform 1
-
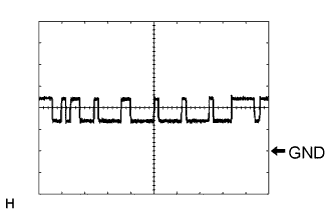
CAN communication signal
Terminal C1-18 (CA1N) - C1-25 (GND) Tool Setting 1 V/DIV., 10 μsec./DIV. Condition Engine switch on (IG)
-
-
Waveform 2
-
CAN communication signal
Terminal C1-40 (CA1P) - C1-25 (GND) Tool Setting 1 V/DIV., 10 μsec./DIV. Condition Engine switch on (IG)
-
-
Waveform 3
-
CAN communication signal
Terminal C1-39 (CA2H) - C1-25 (GND) Tool Setting 1 V/DIV., 10 μsec./DIV. Condition Engine switch on (IG) Tech Tips
The waveform varies depending on the CAN communication signal.
-
-
Waveform 4
-
CAN communication signal
Terminal C1-17 (CA2L) - C1-25 (GND) Tool Setting 1 V/DIV., 10 μsec./DIV. Condition Engine switch on (IG) Tech Tips
The waveform varies depending on the CAN communication signal.
-
-